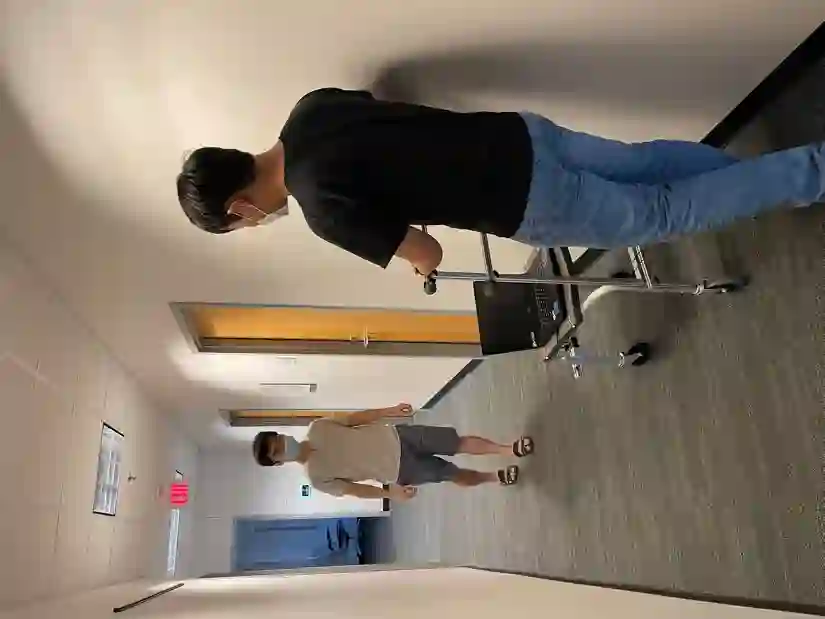
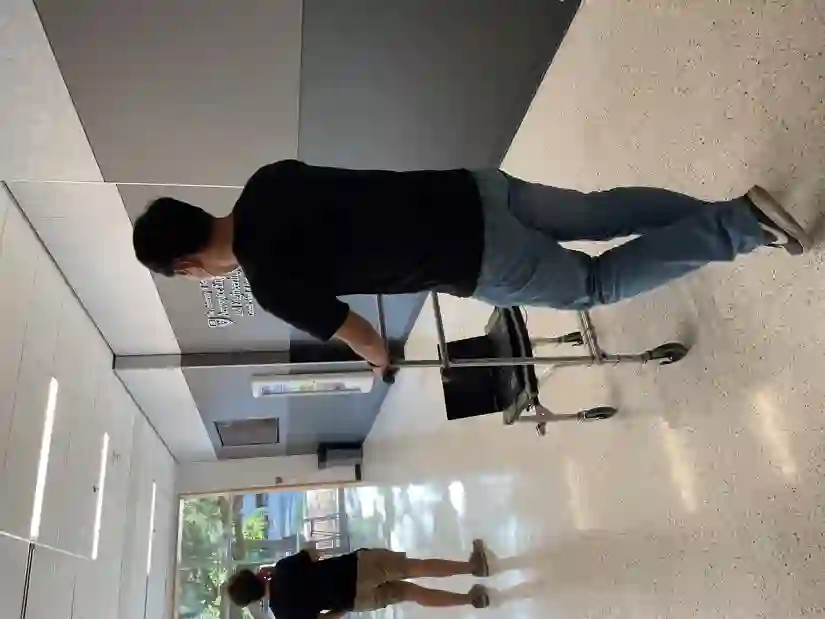
We tackle the problem of perceptive locomotion in dynamic environments. In this problem, a quadrupedal robot must exhibit robust and agile walking behaviors in response to environmental clutter and moving obstacles. We present a hierarchical learning framework, named PRELUDE, which decomposes the problem of perceptive locomotion into high-level decision-making to predict navigation commands and low-level gait generation to realize the target commands. In this framework, we train the high-level navigation controller with imitation learning on human demonstrations collected on a steerable cart and the low-level gait controller with reinforcement learning (RL). Therefore, our method can acquire complex navigation behaviors from human supervision and discover versatile gaits from trial and error. We demonstrate the effectiveness of our approach in simulation and with hardware experiments. Video and code can be found on https://ut-austin-rpl.github.io/PRELUDE.
翻译:我们处理动态环境中的感知运动问题。在这个问题上,一个四重机器人必须表现出强健和灵活的行走行为,以应对环境杂乱和移动障碍。我们提出了一个叫PRELUDE的等级学习框架,它分解了感知运动进入高层决策的问题,以预测导航命令和低声动作生成,从而实现目标命令。在这个框架内,我们对高级导航控制员进行培训,模仿在可驾驶的推车上收集的人类演示知识,对低声操控器进行强化学习(RL)。因此,我们的方法可以从人类监督中获取复杂的导航行为,并从试验和错误中发现多才多艺的格。我们在模拟和硬件实验中展示了我们的方法的有效性。可以在https://ut-austin-rpl.github.io/PRELUDE中找到视频和代码。