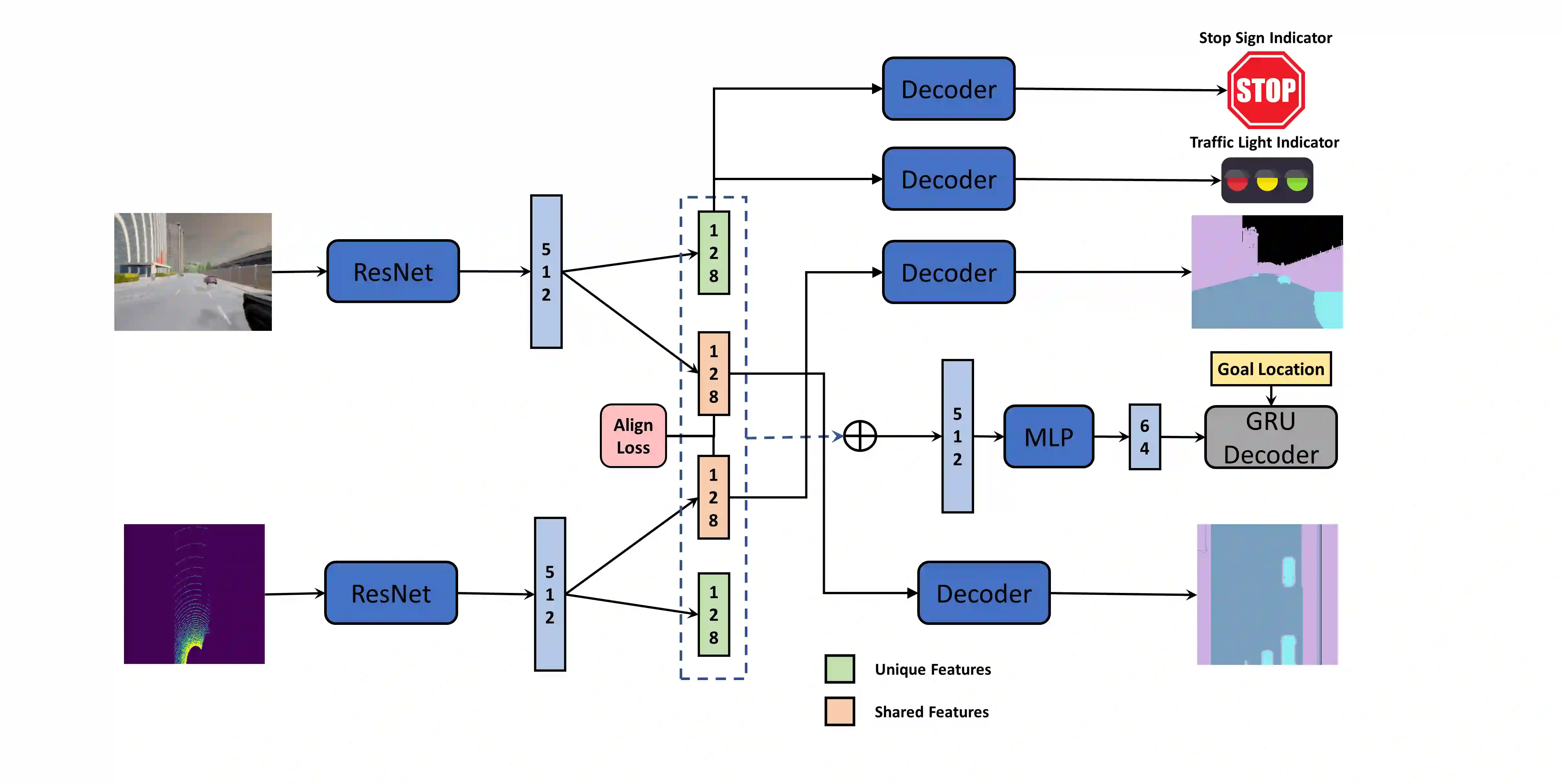
With the rapid development of Pattern Recognition and Computer Vision technologies, tasks like object detection or semantic segmentation have achieved even better accuracy than human beings. Based on these solid foundations, autonomous driving is becoming an important research direction, aiming to revolute the future of transportation and mobility. Sensors are critical to autonomous driving's security and feasibility to perceive the surrounding environment. Multi-Sensor fusion has become a current research hot spot because of its potential for multidimensional perception and integration ability. In this paper, we propose a novel feature-level multi-sensor fusion technology for end-to-end autonomous driving navigation with imitation learning. Our paper mainly focuses on fusion technologies for Lidar and RGB information. We also provide a brand-new penalty-based imitation learning method to reinforce the model's compliance with traffic rules and unify the objective of imitation learning and the metric of autonomous driving.
翻译:随着模式识别和计算机视觉技术的快速发展,诸如物体检测或语义分割等任务已经实现了比人类更好的准确性。基于这些坚实的基础,“自动驾驶”正在成为一个重要的研究方向,旨在改变未来的交通和出行 mobility。传感器对于自动驾驶的安全性和可行性来说至关重要,以感知周围环境。多传感器融合因其多维度感知和集成能力的潜力而成为当前研究的热点之一。在本文中,我们提出了一种新颖的特征级多传感器融合技术,用于端到端自主驾驶导航和模仿学习。本文主要关注激光和 RGB 信息的融合技术,我们还提供了全新的基于惩罚的模仿学习方法来强化模型对交通规则的合规性,并统一模仿学习的目标和自动驾驶的指标。