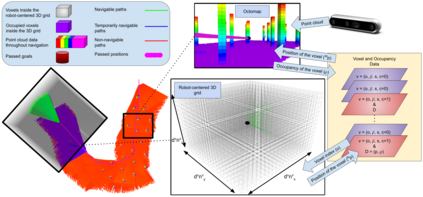
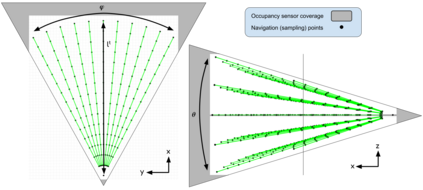
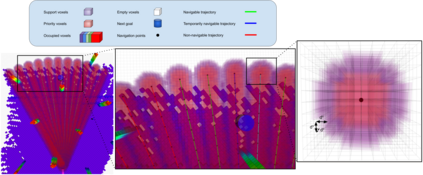
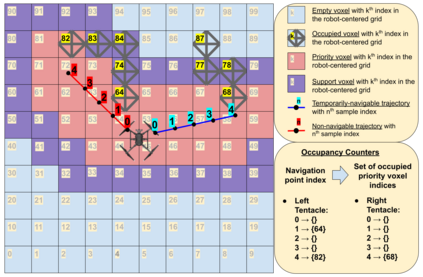
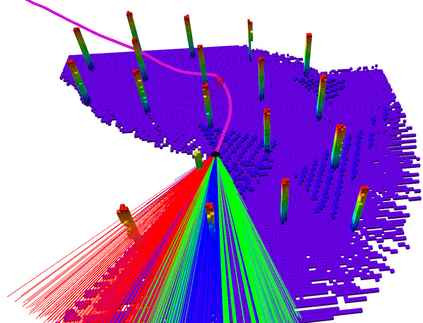
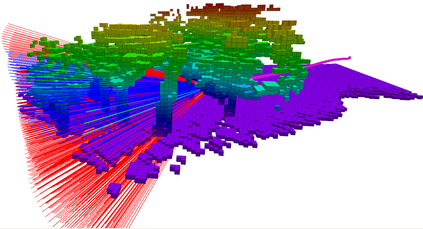
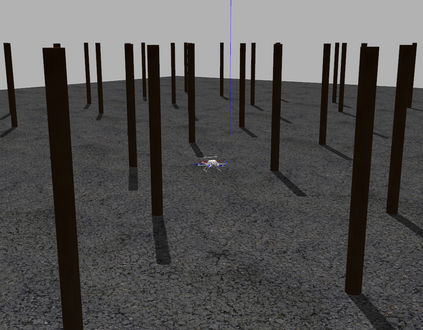
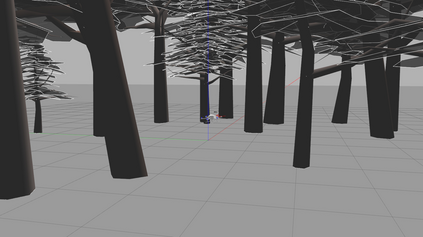
This paper describes and analyzes a reactive navigation framework for mobile robots in unknown environments. The approach does not rely on a global map and only considers the local occupancy in its robot-centered 3D grid structure. The proposed algorithm enables fast navigation by heuristic evaluations of pre-sampled trajectories on-the-fly. At each cycle, these paths are evaluated by a weighted cost function, based on heuristic features such as closeness to the goal, previously selected trajectories, and nearby obstacles. This paper introduces a systematic method to calculate a feasible pose on the selected trajectory, before sending it to the controller for the motion execution. Defining the structures in the framework and providing the implementation details, the paper also explains how to adjust its offline and online parameters. To demonstrate the versatility and adaptability of the algorithm in unknown environments, physics-based simulations on various maps are presented. Benchmark tests show the superior performance of the proposed algorithm over its previous iteration and another state-of-art method. The open-source implementation of the algorithm and the benchmark data can be found at \url{https://github.com/RIVeR-Lab/tentabot}.
翻译:本文描述和分析在未知环境中移动机器人的被动导航框架。 这种方法并不依赖于全球地图,而只是考虑其机器人中心3D网格结构的本地占用情况。 提议的算法能够通过对飞行中预先抽样的轨迹进行超常评估来快速导航。 在每个周期, 这些路径都根据超常性特征, 如接近目标、 先前选择的轨迹和附近障碍等, 以加权成本功能进行评估。 本文引入了一种系统的方法, 用以计算选定轨迹上可行的布局, 然后再将其发送给执行动作的控制器。 定义框架中的结构并提供执行细节。 本文还解释了如何调整其离线参数和在线参数。 为了显示算法在未知环境中的多功能和适应性, 提供了各种地图上的物理模拟。 基准测试显示了所拟议的算法优于先前的反复度和另一个状态方法。 可以在url{ https://gibub. com/ mab/Restent 上找到算法和基准数据。