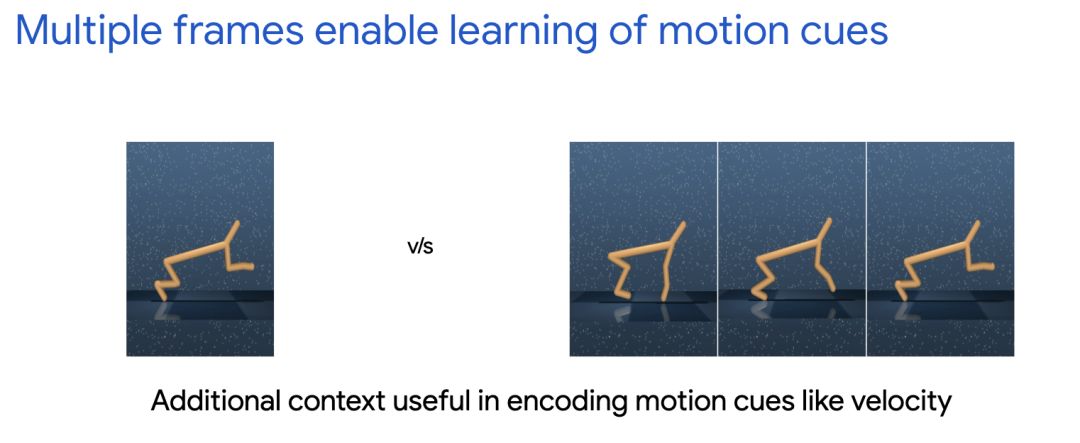
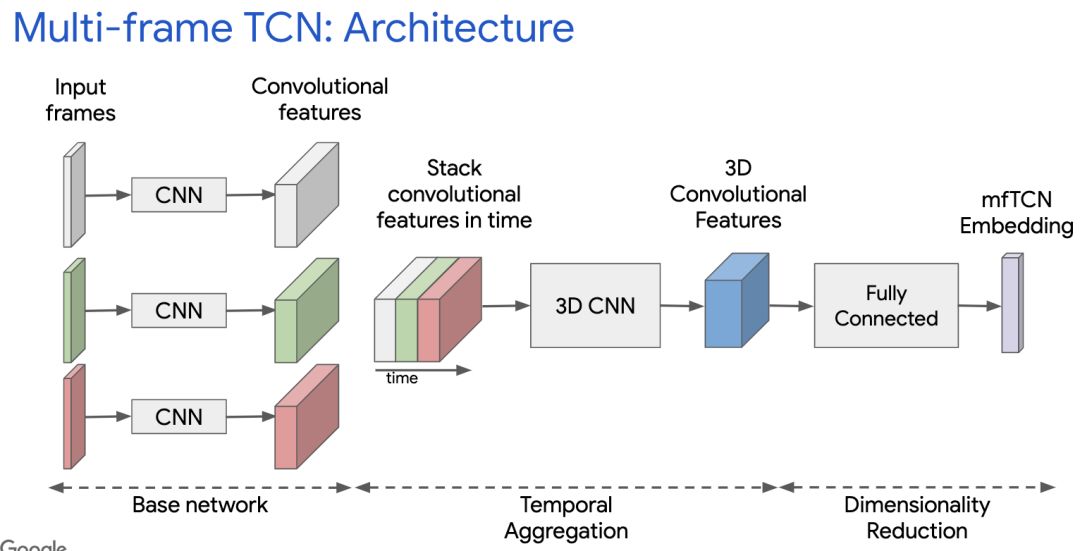
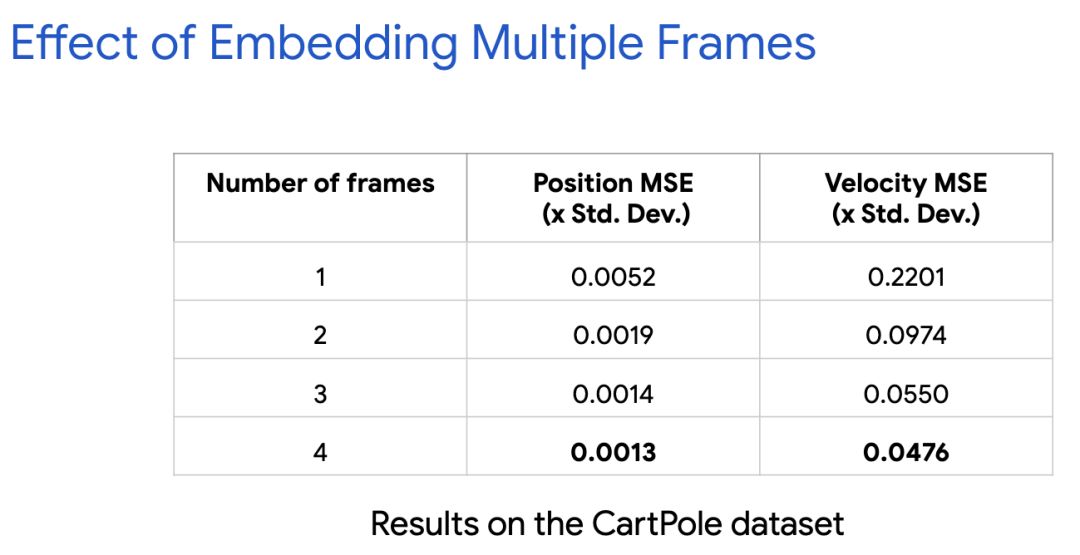
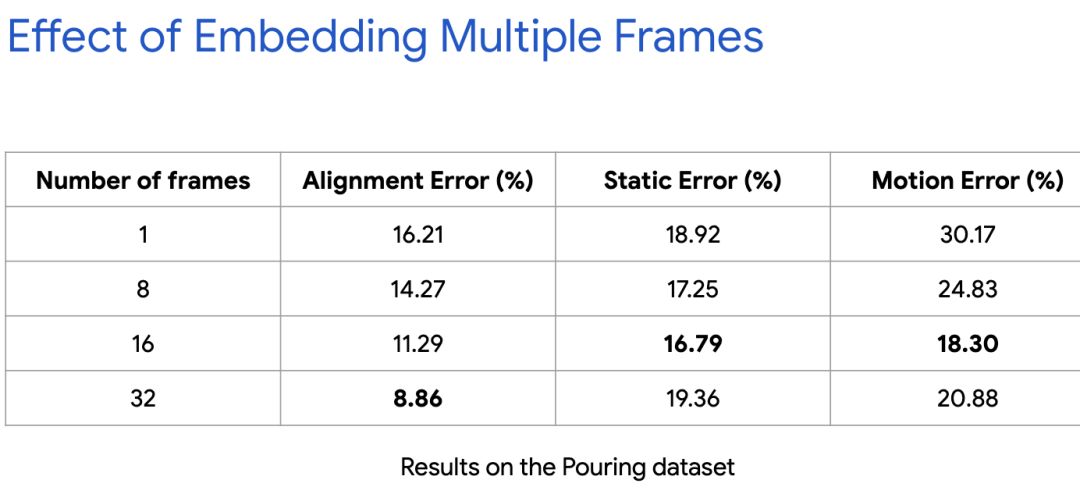
TCN v2 + 3Dconv 运动信息
tcn v2
https://sites.google.com/view/actionablerepresentations
tcn v1
https://github.com/tensorflow/models/tree/master/research/tcn
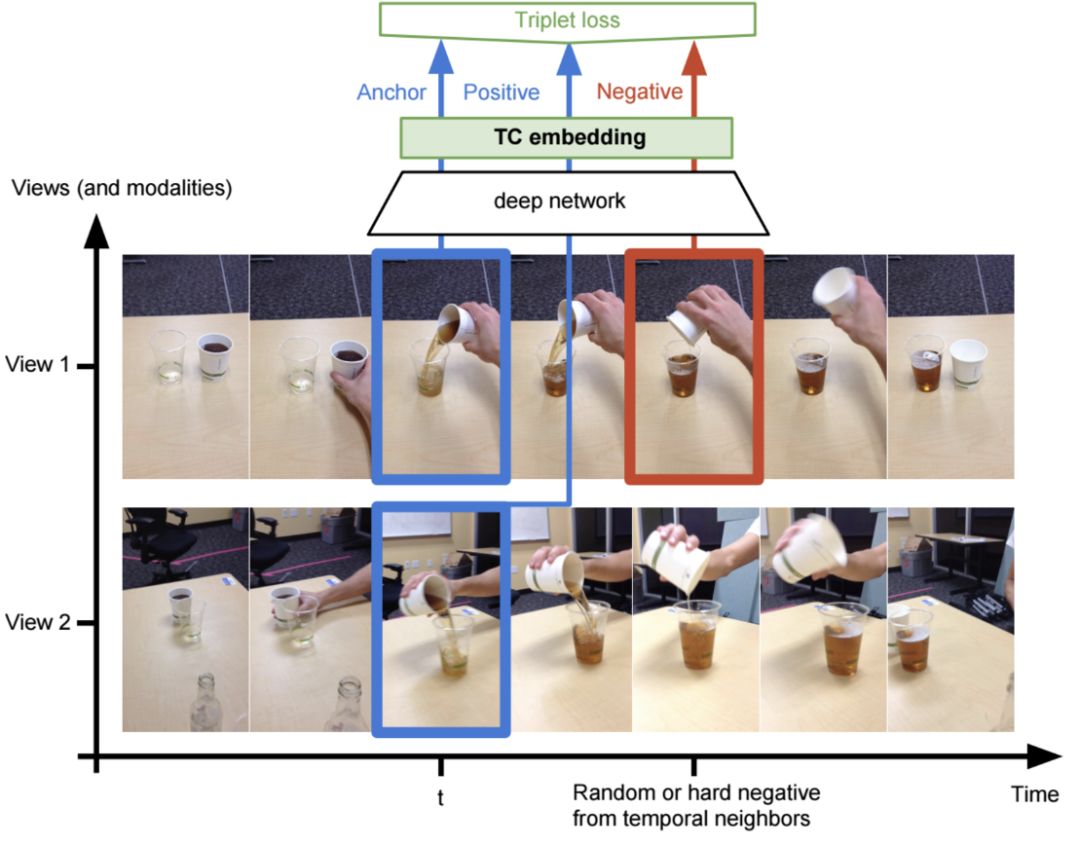
Time Contrastive Networks
This implements "Time Contrastive Networks", which is part of the larger Self-Supervised Imitation Learning project.Contacts
Maintainers of TCN:
Corey Lynch: github, twitter
Pierre Sermanet: github, twitter
Contents
Getting Started
Install Dependencies
Download the Inception v3 Checkpoint
Run all the tests
Concepts
Nearest Neighbor Imitation Videos
PCA & T-SNE Visualization
KNN Classification Error
KNN Classification Error
Multi-view Webcam Video
Data Pipelines
Estimators
Models
Losses
Inference
Configuration
Monitoring Training
Visualization
Tutorial Part I: Collecting Multi-View Webcam Videos
Collect Webcam Videos
Create TFRecords
Tutorial Part II: Training, Evaluation, and Visualization
Generate Imitation Videos
Run PCA & T-SNE Visualization
Download Data
Download the Inception v3 Checkpoint
Define a Config
Train
Evaluate
Monitor training
Visualize
Getting started
Install Dependencies
Tensorflow nightly build or via
pip install tf-nightly-gpu.Bazel
matplotlib
sklearn
opencv
Download Pretrained InceptionV3 Checkpoint
Run the script that downloads the pretrained InceptionV3 checkpoint:
cd tensorflow-models/tcn
python download_pretrained.py
Run all the tests
bazel test :all
Concepts
Multi-View Webcam Video
We provide utilities to collect your own multi-view videos in dataset/webcam.py. See the webcam tutorial for an end to end example of how to collect multi-view webcam data and convert it to the TFRecord format expected by this library.
Data Pipelines
We use the tf.data.Dataset API to construct input pipelines that feed training, evaluation, and visualization. These pipelines are defined in data_providers.py.
Estimators
We define training, evaluation, and inference behavior using the tf.estimator.Estimator API. Seeestimators/mvtcn_estimator.py for an example of how multi-view TCN training, evaluation, and inference is implemented.
Models
Different embedder architectures are implemented in model.py. We used the InceptionConvSSFCEmbedder in the pouring experiments, but we're also evaluating Resnet embedders.
Losses
We use the tf.contrib.losses.metric_learning library's implementations of triplet loss with semi-hard negative mining and npairs loss. In our experiments, npairs loss has better empirical convergence and produces the best qualitative visualizations, and will likely be our choice for future experiments. See the paper for details on the algorithm.
Inference
We support 3 modes of inference for trained TCN models:
Mode 1: Input is a tf.Estimator input_fn (see this for details). Output is an iterator over embeddings and additional metadata. See
labeled_eval.pyfor a usage example.Mode 2: Input is a TFRecord or (or list of TFRecords). This returns an iterator over tuples of (embeddings, raw_image_strings, sequence_name), where embeddings is the [num views, sequence length, embedding size] numpy array holding the full embedded sequence (for all views), raw_image_strings is a [num views, sequence length] string array holding the jpeg-encoded raw image strings, and sequence_name is the name of the sequence. See
generate_videos.pyfor a usage example.Mode 3: Input is a numpy array of size [num images, height, width, num channels]. This returns a tuple of (embeddings, raw_image_strings), where embeddings is a 2-D float32 numpy array holding [num_images, embedding_size] image embeddings, and raw_image_strings is a 1-D string numpy array holding [batch_size] jpeg-encoded image strings. This can be used as follows:
images = np.random.uniform(0, 1, size=(batch_size, 1080, 1920, 3)) embeddings, _ = estimator.inference( images, checkpoint_path=checkpoint_path)
See estimators/base_estimator.py for details.
Configuration
Data pipelines, training, eval, and visualization are all configured using key-value parameters passed as YAML files. Configurations can be nested, e.g.:
learning: optimizer: 'adam' learning_rate: 0.001
T objects
YAML configs are converted to LuaTable-like T object (see utils/luatables.py), which behave like a python dict, but allow you to use dot notation to access (nested) keys. For example we could access the learning rate in the above config snippet via config.learning.learning_rate.
Multiple Configs
Multiple configs can be passed to the various binaries as a comma separated list of config paths via the --config_paths flag. This allows us to specify a default config that applies to all experiments (e.g. how often to write checkpoints, default embedder hyperparams) and one config per experiment holding the just hyperparams specific to the experiment (path to data, etc.).
See configs/tcn_default.yml for an example of our default config and configs/pouring.yml for an example of how we define the pouring experiments.
Configs are applied left to right. For example, consider two config files:
default.yml
learning: learning_rate: 0.001 # Default learning rate. optimizer: 'adam'
myexperiment.yml
learning: learning_rate: 1.0 # Experiment learning rate (overwrites default).data: training: '/path/to/myexperiment/training.tfrecord'
Running
bazel run train.py --config_paths='default.yml,myexperiment.yml'
results in a final merged config called final_training_config.yml
learning: optimizer: 'adam' learning_rate: 1.0data: training: '/path/to/myexperiment/training.tfrecord'
which is created automatically and stored in the experiment log directory alongside model checkpoints and tensorboard summaries. This gives us a record of the exact configs that went into each trial.
Monitoring training
We usually look at two validation metrics during training: knn classification error and multi-view alignment.
KNN-Classification Error
In cases where we have labeled validation data, we can compute the average cross-sequence KNN classification error (1.0 - recall@k=1) over all embedded labeled images in the validation set. See labeled_eval.py.
Multi-view Alignment
In cases where there is no labeled validation data, we can look at the how well our model aligns multiple views of same embedded validation sequences. That is, for each embedded validation sequence, for all cross-view pairs, we compute the scaled absolute distance between ground truth time indices and knn time indices. See alignment.py.
Visualization
We visualize the embedding space learned by our models in two ways: nearest neighbor imitation videos and PCA/T-SNE.
Nearest Neighbor Imitation Videos
One of the easiest way to evaluate the understanding of your model is to see how well the model can semantically align two videos via nearest neighbors in embedding space.
Consider the case where we have multiple validation demo videos of a human or robot performing the same task. For example, in the pouring experiments, we collected many different multiview validation videos of a person pouring the contents of one container into another, then setting the container down. If we'd like to see how well our embeddings generalize across viewpoint, object/agent appearance, and background, we can construct what we call "Nearest Neighbor Imitation" videos, by embedding some validation query sequence i from view 1, and finding the nearest neighbor for each query frame in some embedded target sequence j filmed from view 1. Here's an example of the final product.
See generate_videos.py for details.
PCA & T-SNE Visualization
We can also embed a set of images taken randomly from validation videos and visualize the embedding space using PCA projection and T-SNE in the tensorboard projector. See visualize_embeddings.py for details.
Tutorial Part I: Collecting Multi-View Webcam Videos
Here we give an end-to-end example of how to collect your own multiview webcam videos and convert them to the TFRecord format expected by training.
Note: This was tested with up to 8 concurrent Logitech c930e webcams extended with Plugable 5 Meter (16 Foot) USB 2.0 Active Repeater Extension Cables.
Collect webcam videos
Go to dataset/webcam.py
Plug your webcams in and run
ls -ltrh /dev/video*You should see one device listed per connected webcam.
Define some environment variables describing the dataset you're collecting.
dataset=tutorial # Name of the dataset.mode=train # E.g. 'train', 'validation', 'test', 'demo'.num_views=2 # Number of webcams.viddir=/tmp/tcn/videos # Output directory for the videos.tmp_imagedir=/tmp/tcn/tmp_images # Temp directory to hold images.debug_vids=1 # Whether or not to generate side-by-side debug videos.export DISPLAY=:0.0 # This allows real time matplotlib display.
Run the webcam.py script.
bazel build -c opt --copt=-mavx webcam && \ bazel-bin/webcam \ --dataset $dataset \ --mode $mode \ --num_views $num_views \ --tmp_imagedir $tmp_imagedir \ --viddir $viddir \ --debug_vids 1
Hit Ctrl-C when done collecting, upon which the script will compile videos for each view and optionally a debug video concatenating multiple simultaneous views.
If
--seqnameflag isn't set, the script will name the first sequence '0', the second sequence '1', and so on (meaning you can just keep rerunning step 3.). When you are finished, you should see an output viddir with the following structure:videos/0_view0.mov videos/0_view1.mov ... videos/0_viewM.mov videos/1_viewM.mov ... videos/N_viewM.movfor N sequences and M webcam views.
Create TFRecords
Use dataset/videos_to_tfrecords.py to convert the directory of videos into a directory of TFRecords files, one per multi-view sequence.
viddir=/tmp/tcn/videos dataset=tutorial mode=train videos=$viddir/$datasetbazel build -c opt videos_to_tfrecords && \ bazel-bin/videos_to_tfrecords --logtostderr \ --input_dir $videos/$mode \ --output_dir ~/tcn_data/$dataset/$mode \ --max_per_shard 400
Setting --max_per_shard > 0 allows you to shard training data. We've observed that sharding long training sequences provides better performance in terms of global steps/sec.
This should be left at the default of 0 for validation / test data.
You should now have a directory of TFRecords files with the following structure:
output_dir/0.tfrecord
...
output_dir/N.tfrecord
1 TFRecord file for each of N multi-view sequences.
Now we're ready to move on to part II: training, evaluation, and visualization.
Tutorial Part II: Training, Evaluation, and Visualization
Here we give an end-to-end example of how to train, evaluate, and visualize the embedding space learned by TCN models.
Download Data
We will be using the 'Multiview Pouring' dataset, which can be downloaded using the download.sh script here.
The rest of the tutorial will assume that you have your data downloaded to a folder at ~/tcn_data.
mkdir ~/tcn_data mv ~/Downloads/download.sh ~/tcn_data ./download.sh
You should now have the following path containing all the data:
ls ~/tcn_data/multiview-pouring
labels README.txt tfrecords videos
Download Pretrained Inception Checkpoint
If you haven't already, run the script that downloads the pretrained InceptionV3 checkpoint:
python download_pretrained.py
Define A Config
For our experiment, we create 2 configs:
configs/tcn_default.yml: This contains all the default hyperparameters that generally don't vary across experiments.configs/pouring.yml: This contains all the hyperparameters that are specific to the pouring experiment.
Important note about configs/pouring.yml:
data.eval_cropping: We use 'pad200' for the pouring dataset, which was filmed rather close up on iphone cameras. A better choice for data filmed on webcam is likely 'crop_center'. See preprocessing.py for options.
Train
Run the training binary:
logdir=/tmp/tcn/pouringc=configsconfigs=$c/tcn_default.yml,$c/pouring.ymlbazel build -c opt --copt=-mavx --config=cuda train && \bazel-bin/train \--config_paths $configs --logdir $logdir
Evaluate
Run the binary that computes running validation loss. Set export CUDA_VISIBLE_DEVICES= to run on CPU.
bazel build -c opt --copt=-mavx eval && \ bazel-bin/eval \ --config_paths $configs --logdir $logdir
Run the binary that computes running validation cross-view sequence alignment. Set export CUDA_VISIBLE_DEVICES= to run on CPU.
bazel build -c opt --copt=-mavx alignment && \ bazel-bin/alignment \ --config_paths $configs --checkpointdir $logdir --outdir $logdir
Run the binary that computes running labeled KNN validation error. Set export CUDA_VISIBLE_DEVICES= to run on CPU.
bazel build -c opt --copt=-mavx labeled_eval && \ bazel-bin/labeled_eval \ --config_paths $configs --checkpointdir $logdir --outdir $logdir
Monitor training
Run tensorboard --logdir=$logdir. After a bit of training, you should see curves that look like this:
Training lossValidation lossValidation AlignmentAverage Validation KNN Classification ErrorIndividual Validation KNN Classification ErrorsVisualize
To visualize the embedding space learned by a model, we can:
Generate Imitation Videos
# Use the automatically generated final config file as config.configs=$logdir/final_training_config.yml# Visualize checkpoint 40001.checkpoint_iter=40001# Use validation records for visualization.records=~/tcn_data/multiview-pouring/tfrecords/val# Write videos to this location.outdir=$logdir/tcn_viz/imitation_vids
bazel build -c opt --config=cuda --copt=-mavx generate_videos && \ bazel-bin/generate_videos \ --config_paths $configs \ --checkpointdir $logdir \ --checkpoint_iter $checkpoint_iter \ --query_records_dir $records \ --target_records_dir $records \ --outdir $outdir
After the script completes, you should see a directory of videos with names like:
$outdir/qtrain_clearodwalla_to_clear1_realv1_imtrain_clearsoda_to_white13_realv0.mp4
that look like this:
T-SNE / PCA Visualization
Run the binary that generates embeddings and metadata.
outdir=$logdir/tcn_viz/embedding_viz bazel build -c opt --config=cuda --copt=-mavx visualize_embeddings && \ bazel-bin/visualize_embeddings \ --config_paths $configs \ --checkpointdir $logdir \ --checkpoint_iter $checkpoint_iter \ --embedding_records $records \ --outdir $outdir \ --num_embed 1000 \ --sprite_dim 64
Run tensorboard, pointed at the embedding viz output directory.
tensorboard --logdir=$outdirYou should see something like this in tensorboard.