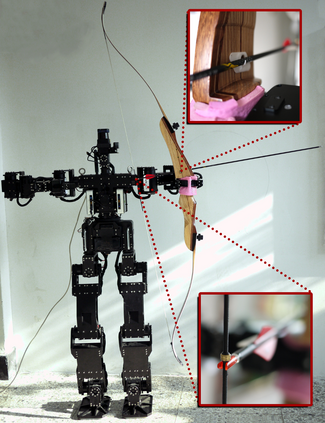
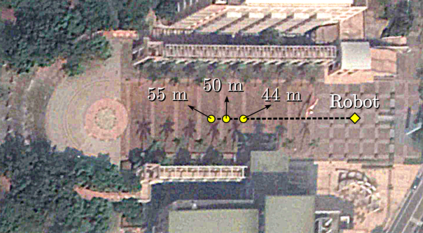
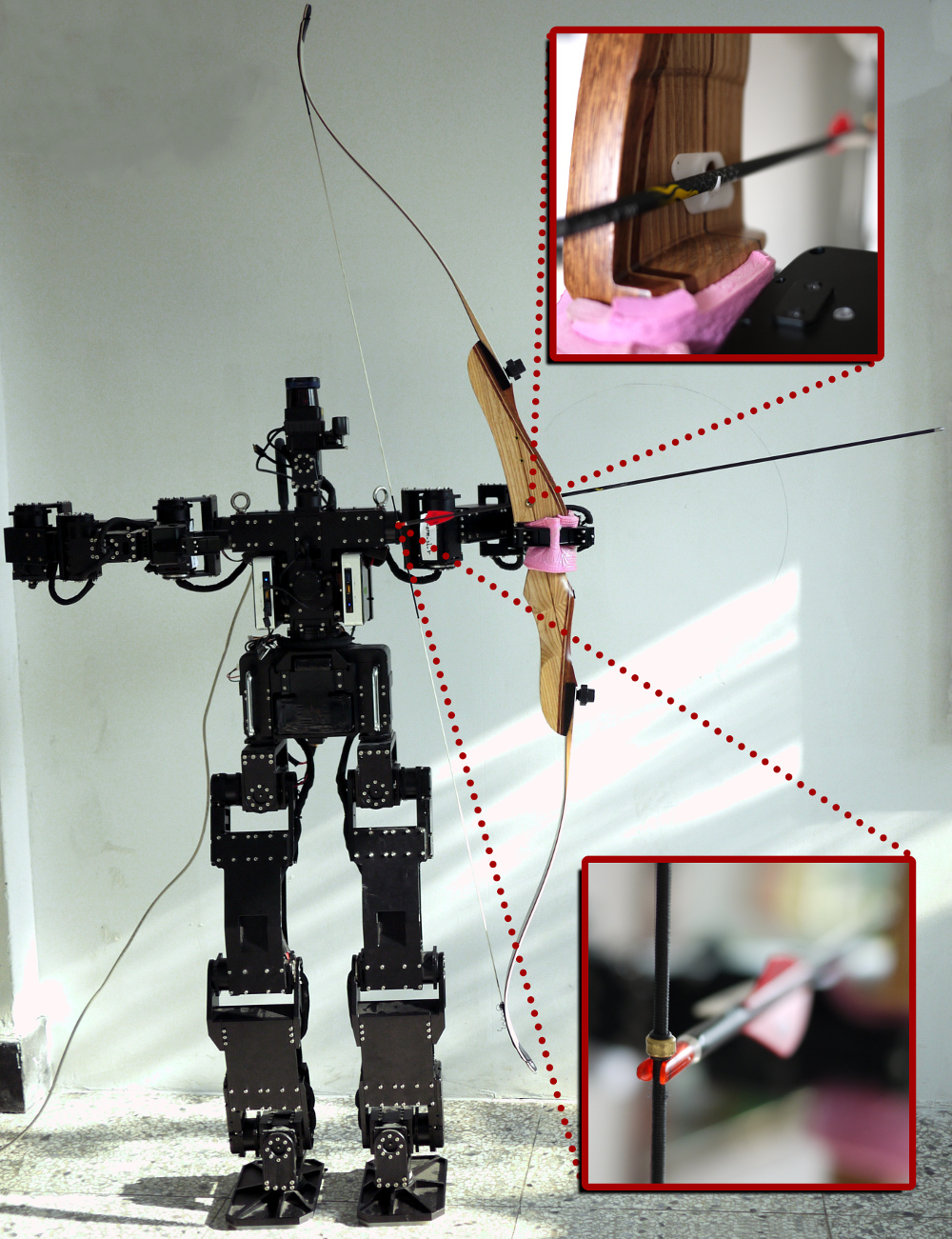
The field of robotics, and more especially humanoid robotics, has several established competitions with research oriented goals in mind. Challenging the robots in a handful of tasks, these competitions provide a way to gauge the state of the art in robotic design, as well as an indicator for how far we are from reaching human performance. The most notable competitions are RoboCup, which has the long-term goal of competing against a real human team in 2050, and the FIRA HuroCup league, in which humanoid robots have to perform tasks based on actual Olympic events. Having robots compete against humans under the same rules is a challenging goal, and, we believe that it is in the sport of archery that humanoid robots have the most potential to achieve it in the near future. In this work, we perform a first step in this direction. We present a humanoid robot that is capable of gripping, drawing and shooting a recurve bow at a target 10 meters away with considerable accuracy. Additionally, we show that it is also capable of shooting distances of over 50 meters.
翻译:机器人领域,特别是人造机器人领域,有几项既定的竞赛,其目标以研究为目的。在少数任务中挑战机器人,这些竞赛提供了衡量机器人设计方面最新水平的方法,以及我们距离人类性能最远的指标。最引人注目的竞赛是机器人Cup,其长期目标是在2050年与真正的人类团队竞争,以及FIRA HuroCup联盟,其中人造机器人必须执行基于实际奥林匹克活动的任务。根据相同的规则与人类竞争是一个挑战性的目标,我们认为人类机器人在射箭运动中拥有在最近的将来取得这种成就的最大潜力。在这项工作中,我们朝着这个方向迈出第一步。我们展示了一台人类机器人,能够在离目标10米远的地方紧紧地抓住、绘制和射射箭。此外,我们还表明它有能力射射距离超过50米。