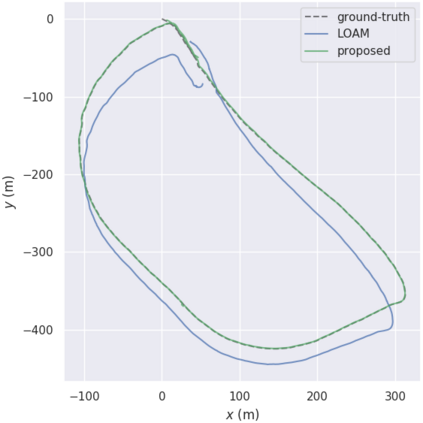
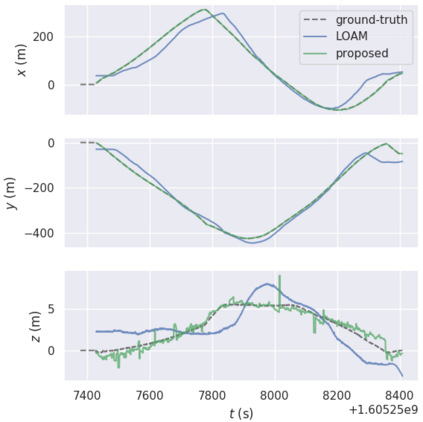
Localization on 3D data is a challenging task for unmanned vehicles, especially in long-term dynamic urban scenarios. Due to the generality and long-term stability, the pole-like objects are very suitable as landmarks for unmanned vehicle localization in time-varing scenarios. In this paper, a long-term LiDAR-only localization algorithm based on semantic cluster map is proposed. At first, the Convolutional Neural Network(CNN) is used to infer the semantics of LiDAR point clouds. Combined with the point cloud segmentation, the long-term static objects pole/trunk in the scene are extracted and registered into a semantic cluster map. When the unmanned vehicle re-enters the environment again, the relocalization is completed by matching the clusters of the local map with the clusters of the global map. Furthermore, the continuous matching between the local and global maps stably outputs the global pose at 2Hz to correct the drift of the 3D LiDAR odometry. The proposed approach realizes localization in the long-term scenarios without maintaining the high-precision point cloud map. The experimental results on our campus dataset demonstrate that the proposed approach performs better in localization accuracy compared with the current state-of-the-art methods. The source of this paper is available at:http://www.github.com/HITSZ-NRSL/long-term-localization.
翻译:3D 数据本地化对于无人飞行器来说是一项艰巨的任务,特别是在长期动态城市情景中。由于一般性和长期稳定性,极形物体非常适合作为在时间变化情景中无人飞行器本地化的里程碑。在本文件中,根据语义组群图提出了长期的LIDAR(仅限LIDAR)本地化算法。首先,利用革命神经网络(CNN)来推断LIDAR点云层的语义。结合点云层分割法,长期固定物体在现场的极值/丘纹图被提取并登记在语义组图中。当无人飞行器再次进入环境时,则通过将本地地图的组群与全球地图组相匹配来完成重新本地化。此外,为了纠正3DLIDAR点云层的漂移,全球星座图(CNNNNNN)被持续地拼凑在一起。拟议的方法在不维持高精度轨道点云层/轨图的情况下实现长期本地化。实验性结果将显示在本地数据库/RLR的当前数据源图中。