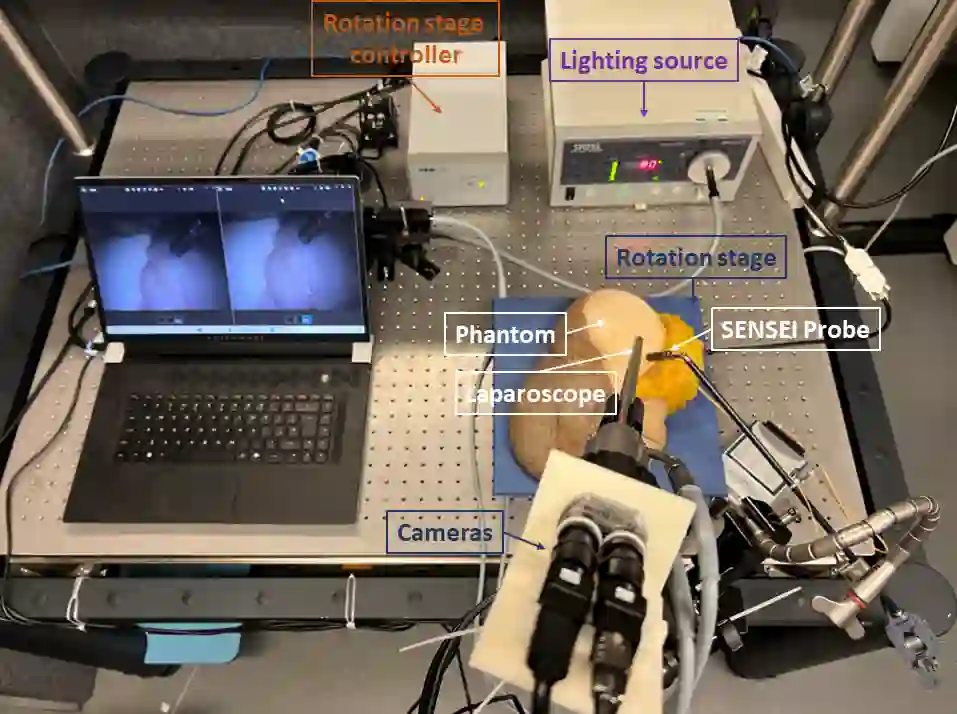
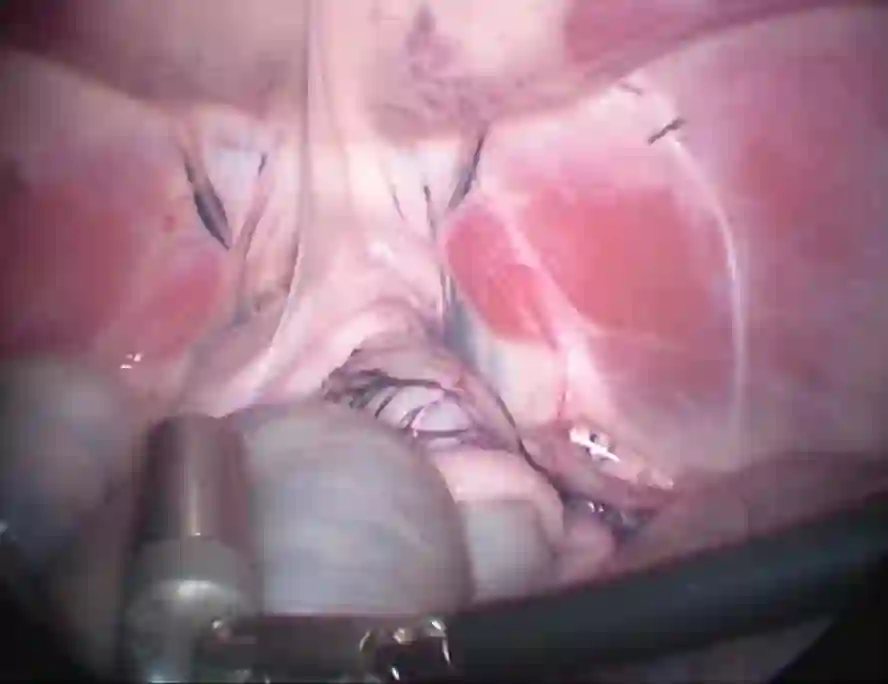
In surgical oncology, it is challenging for surgeons to identify lymph nodes and completely resect cancer even with pre-operative imaging systems like PET and CT, because of the lack of reliable intraoperative visualization tools. Endoscopic radio-guided cancer detection and resection has recently been evaluated whereby a novel tethered laparoscopic gamma detector is used to localize a preoperatively injected radiotracer. This can both enhance the endoscopic imaging and complement preoperative nuclear imaging data. However, gamma activity visualization is challenging to present to the operator because the probe is non-imaging and it does not visibly indicate the activity origination on the tissue surface. Initial failed attempts used segmentation or geometric methods, but led to the discovery that it could be resolved by leveraging high-dimensional image features and probe position information. To demonstrate the effectiveness of this solution, we designed and implemented a simple regression network that successfully addressed the problem. To further validate the proposed solution, we acquired and publicly released two datasets captured using a custom-designed, portable stereo laparoscope system. Through intensive experimentation, we demonstrated that our method can successfully and effectively detect the sensing area, establishing a new performance benchmark. Code and data are available at https://github.com/br0202/Sensing_area_detection.git
翻译:暂无翻译