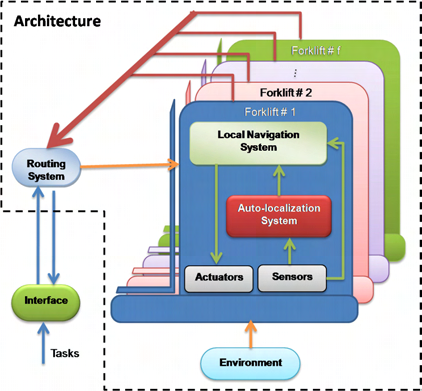
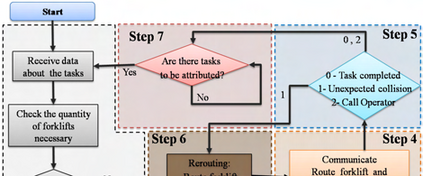
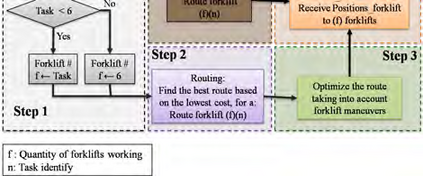
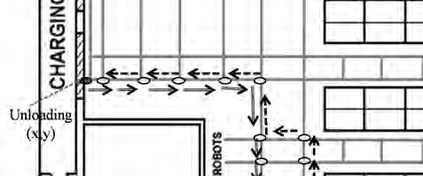
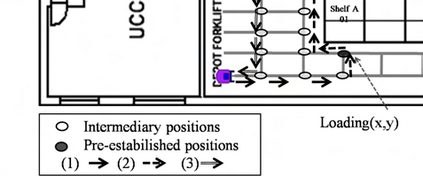
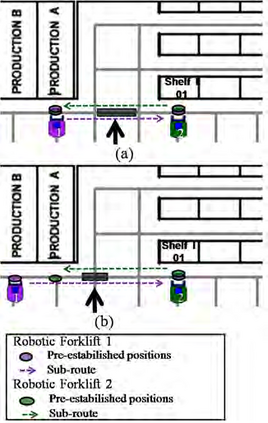
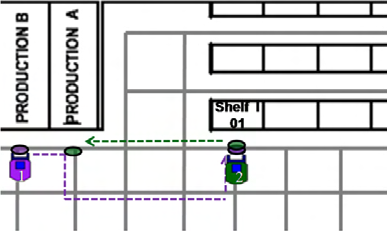
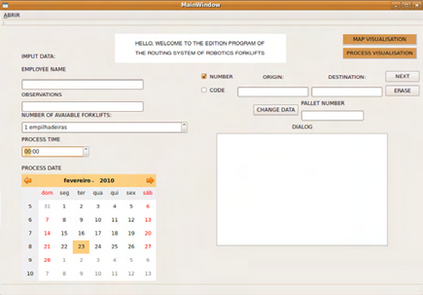
Automation of logistic processes is essential to improve productivity and reduce costs. In this context, intelligent warehouses are becoming a key to logistic systems thanks to their ability of optimizing transportation tasks and, consequently, reducing costs. This paper initially presents briefly routing systems applied on intelligent warehouses. Then, we present the approach used to develop our router system. This router system is able to solve traffic jams and collisions, generate conflict-free and optimized paths before sending the final paths to the robotic forklifts. It also verifies the progress of all tasks. When a problem occurs, the router system can change the task priorities, routes, etc. in order to avoid new conflicts. In the routing simulations, each vehicle executes its tasks starting from a predefined initial pose, moving to the desired position. Our algorithm is based on Dijkstra's shortest path and the time window approaches and it was implemented in C language. Computer simulation tests were used to validate the algorithm efficiency under different working conditions. Several simulations were carried out using the Player/Stage Simulator to test the algorithms. Thanks to the simulations, we could solve many faults and refine the algorithms before embedding them in real robots.
翻译:暂无翻译