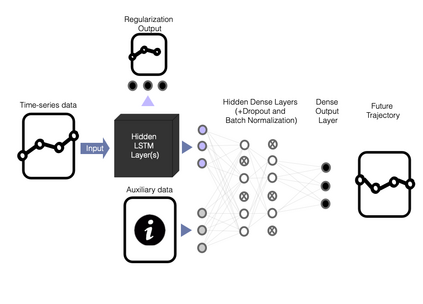
With the unprecedented shift towards automated urban environments in recent years, a new paradigm is required to study pedestrian behaviour. Studying pedestrian behaviour in futuristic scenarios requires modern data sources that consider both the Automated Vehicle (AV) and pedestrian perspectives. Current open datasets on AVs predominantly fail to account for the latter, as they do not include an adequate number of events and associated details that involve pedestrian and vehicle interactions. To address this issue, we propose using Virtual Reality (VR) data as a complementary resource to current datasets, which can be designed to measure pedestrian behaviour under specific conditions. In this research, we focus on the context-aware pedestrian trajectory prediction framework for automated vehicles at mid-block unsignalized crossings. For this purpose, we develop a novel multi-input network of Long Short-Term Memory (LSTM) and fully connected dense layers. In addition to past trajectories, the proposed framework incorporates pedestrian head orientations and distance to the upcoming vehicles as sequential input data. By merging the sequential data with contextual information of the environment, we train a model to predict the future pedestrian trajectory. Our results show that the prediction error and overfitting to the training data are reduced by considering contextual information in the model. To analyze the application of the methods to real AV data, the proposed framework is trained and applied to pedestrian trajectory extracted from an open-access video dataset. Finally, by implementing a game theory-based model interpretability method, we provide detailed insights and propose recommendations to improve the current automated vehicle sensing systems from a pedestrian-oriented point of view.
翻译:随着近年来前所未有的向自动化城市环境的转变,需要一种新的模式来研究行人行为。研究行人在未来情景下的行为需要现代数据源,这种数据源既考虑自动车辆(AV)的角度,也考虑行人的观点。目前AV上的开放数据集主要没有考虑到后者,因为其中不包括足够数量的事件和相关细节,涉及行人和车辆互动。为了解决这一问题,我们提议使用虚拟现实(VR)数据作为当前数据集的补充资源,这些数据可以用来测量行人在特定条件下的行为。在这项研究中,我们侧重于考虑中区自动车辆的上行人轨预测框架。为此,我们开发了一个全新的长短期记忆多投入网络(LSTM)和完全相连的密集层。除了以往的轨迹外,拟议框架将行人头方向和距离作为基于新模式的输入数据。通过将顺序数据与环境背景信息合并,我们培训一个模型来预测未来行人轨迹。我们的成果表明,从预测错误和经过培训的行人轨迹框架应用到经过培训的数据的轨迹框架。我们提议,从预测的逻辑分析将最终数据推算到经过数据推算数据。