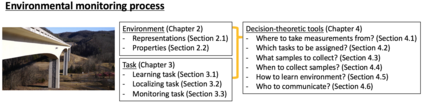
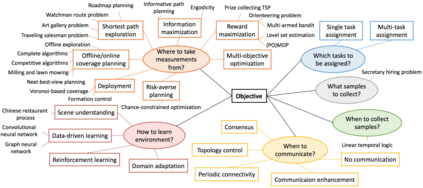
Robotics has dramatically increased our ability to gather data about our environments, creating an opportunity for the robotics and algorithms communities to collaborate on novel solutions to environmental monitoring problems. To understand a taxonomy of problems and methods in this realm, we present the first comprehensive survey of decision-theoretic approaches that enable efficient sampling of various environmental processes. We investigate representations for different environments, followed by a discussion of using these presentations to solve tasks of interest, such as learning, localization, and monitoring. To efficiently implement the tasks, decision-theoretic optimization algorithms consider: (1) where to take measurements from, (2) which tasks to be assigned, (3) what samples to collect, (4) when to collect samples, (5) how to learn environment; and (6) who to communicate. Finally, we summarize our study and present the challenges and opportunities in robotic environmental monitoring.
翻译:暂无翻译