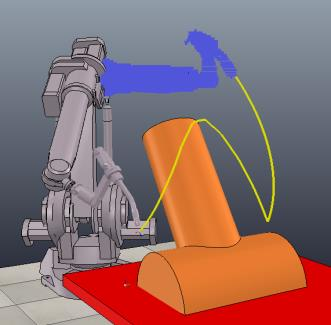
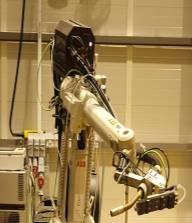
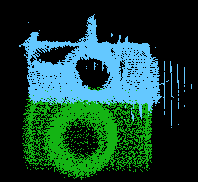
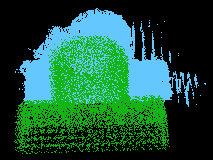
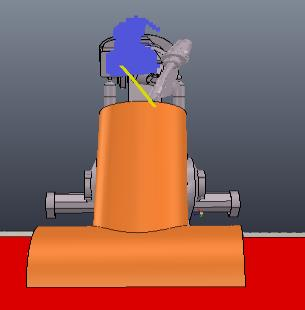
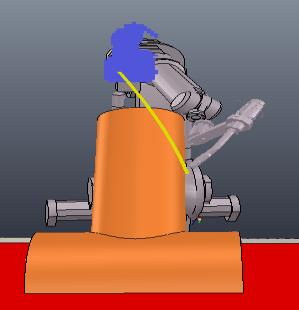
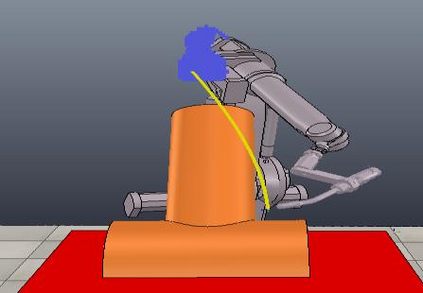
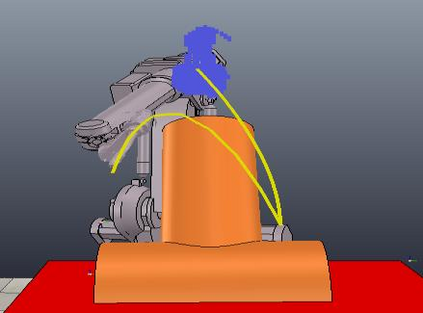
Automatic welding of tubular TKY joints is an important and challenging task for the marine and offshore industry. In this paper, a framework for tubular joint detection and motion planning is proposed. The pose of the real tubular joint is detected using RGB-D sensors, which is used to obtain a real-to-virtual mapping for positioning the workpiece in a virtual environment. For motion planning, a Bi-directional Transition based Rapidly exploring Random Tree (BiTRRT) algorithm is used to generate trajectories for reaching the desired goals. The complete framework is verified with experiments, and the results show that the robot welding torch is able to transit without collision to desired goals which are close to the tubular joint.
翻译:对海洋和近海工业来说,自动焊接管状TKY接头是一项重要而具有挑战性的任务。本文提出了一个管状联合探测和运动规划的框架。真正的管状联合体的构成是通过RGB-D传感器探测出来的,该传感器用于获取真实到虚拟环境中定位工作器的实际到虚拟图象。关于运动规划,一个基于快速探索随机树(BiTRRT)的双向过渡算法被用于生成轨道,以实现预期目标。完整的框架通过实验得到验证,结果显示机器人焊接炉能够在不碰撞到接近管状联合的预期目标的情况下通过。