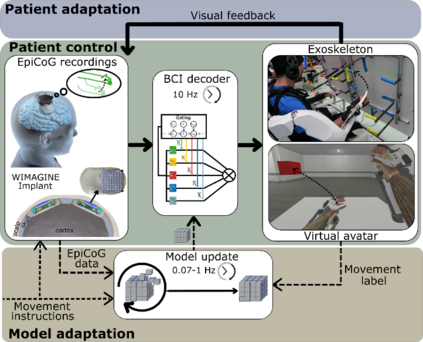
Brain-computer interfaces (BCIs) still face many challenges to step out of laboratories to be used in real-life applications. A key one persists in the high performance control of diverse effectors for complex tasks, using chronic and safe recorders. This control must be robust over time and of high decoding performance without continuous recalibration of the decoders. In the article, asynchronous control of an exoskeleton by a tetraplegic patient using a chronically implanted epidural electrocorticography (EpiCoG) implant is demonstrated. For this purpose, an adaptive online tensor-based decoder: the Recursive Exponentially Weighted Markov-Switching multi-Linear Model (REW-MSLM) was developed. We demonstrated over a period of 6 months the stability of the 8-dimensional alternative bimanual control of the exoskeleton and its virtual avatar using REW-MSLM without recalibration of the decoder.
翻译:脑计算机界面(BCIs)在走出实验室用于现实应用方面仍然面临许多挑战。 关键在于使用慢性和安全记录器对复杂任务的各种影响器进行高性能控制,这种控制必须长期保持稳健,而且高解码性能,而不对解码器进行连续校正。 文章中,四肢瘫痪病人使用长期植入的肾上腺细胞电解术(EpiCoG)植入器对外骨骼进行无同步控制。 为此,演示了一个适应性在线高压解码器:开发了Recursential Eighted Markov-Switching多线模型(REW-MLM),6个月来演示了外骨骼及其虚拟血管8维替代双控的稳定性,使用了REW-MLM,而没有对解码器进行再校正。