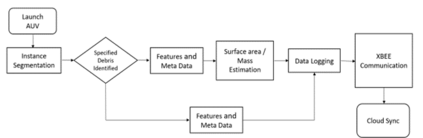
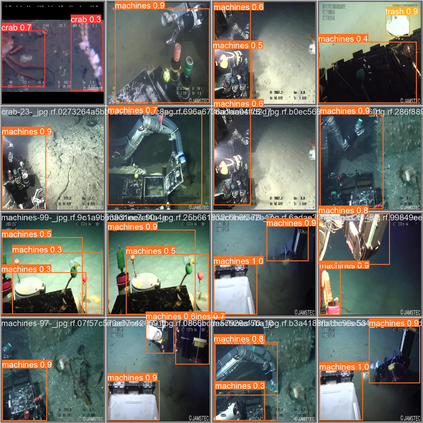
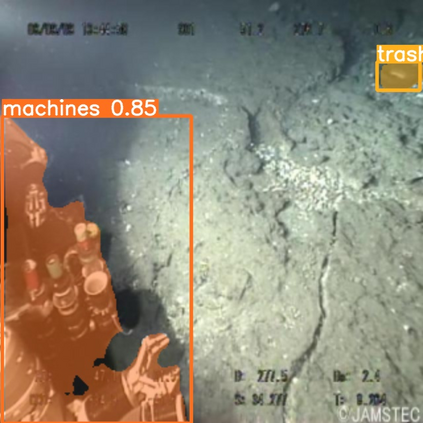
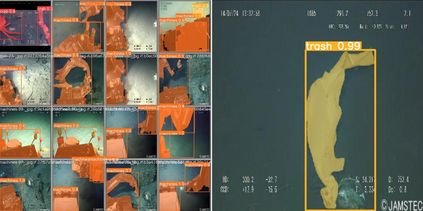
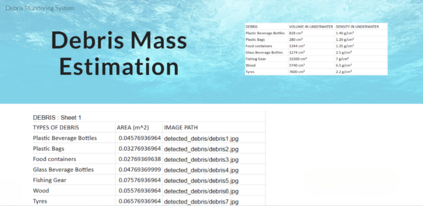
Marine debris poses a significant threat to the survival of marine wildlife, often leading to entanglement and starvation, ultimately resulting in death. Therefore, removing debris from the ocean is crucial to restore the natural balance and allow marine life to thrive. Instance segmentation is an advanced form of object detection that identifies objects and precisely locates and separates them, making it an essential tool for autonomous underwater vehicles (AUVs) to navigate and interact with their underwater environment effectively. AUVs use image segmentation to analyze images captured by their cameras to navigate underwater environments. In this paper, we use instance segmentation to calculate the area of individual objects within an image, we use YOLOV7 in Roboflow to generate a set of bounding boxes for each object in the image with a class label and a confidence score for every detection. A segmentation mask is then created for each object by applying a binary mask to the object's bounding box. The masks are generated by applying a binary threshold to the output of a convolutional neural network trained to segment objects from the background. Finally, refining the segmentation mask for each object is done by applying post-processing techniques such as morphological operations and contour detection, to improve the accuracy and quality of the mask. The process of estimating the area of instance segmentation involves calculating the area of each segmented instance separately and then summing up the areas of all instances to obtain the total area. The calculation is carried out using standard formulas based on the shape of the object, such as rectangles and circles. In cases where the object is complex, the Monte Carlo method is used to estimate the area. This method provides a higher degree of accuracy than traditional methods, especially when using a large number of samples.
翻译:暂无翻译