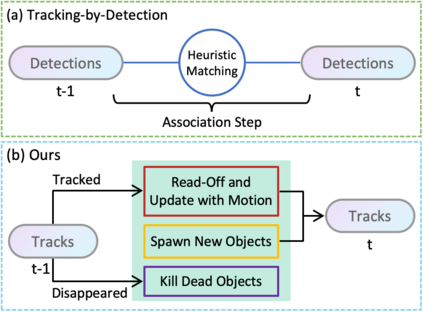
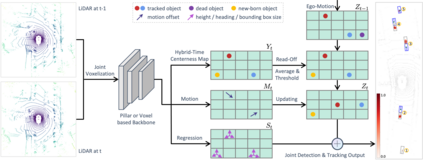
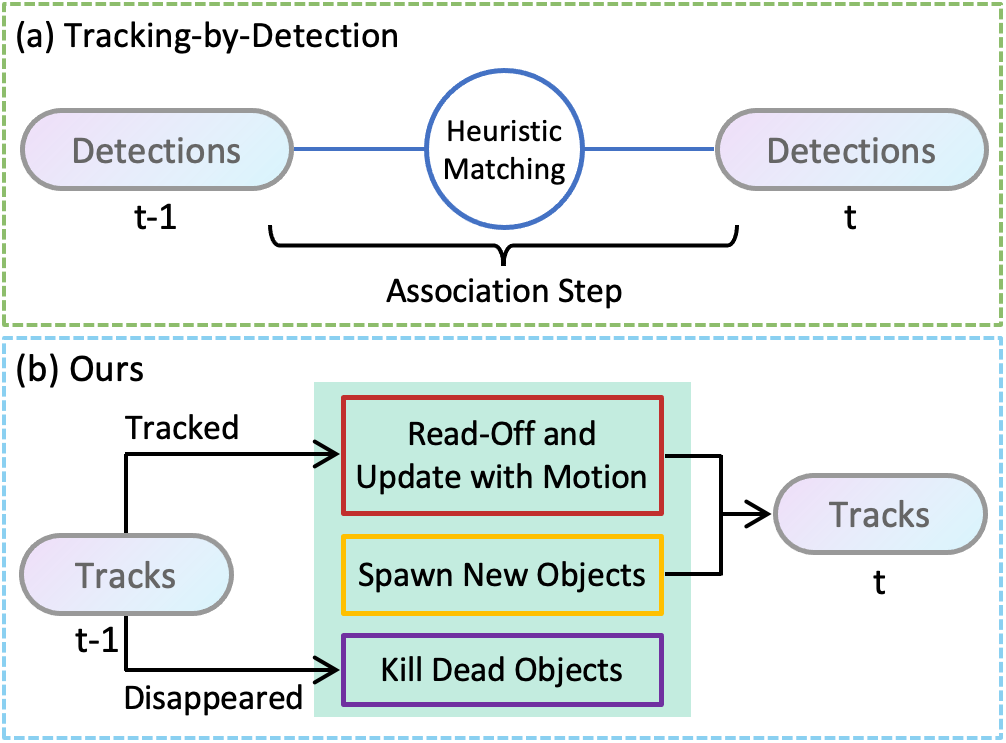
3D multi-object tracking in LiDAR point clouds is a key ingredient for self-driving vehicles. Existing methods are predominantly based on the tracking-by-detection pipeline and inevitably require a heuristic matching step for the detection association. In this paper, we present SimTrack to simplify the hand-crafted tracking paradigm by proposing an end-to-end trainable model for joint detection and tracking from raw point clouds. Our key design is to predict the first-appear location of each object in a given snippet to get the tracking identity and then update the location based on motion estimation. In the inference, the heuristic matching step can be completely waived by a simple read-off operation. SimTrack integrates the tracked object association, newborn object detection, and dead track killing in a single unified model. We conduct extensive evaluations on two large-scale datasets: nuScenes and Waymo Open Dataset. Experimental results reveal that our simple approach compares favorably with the state-of-the-art methods while ruling out the heuristic matching rules.
翻译:在LiDAR点云中, 3D 多角度跟踪是自驾驶车辆的关键成分。 现有方法主要基于跟踪逐次检测管道, 不可避免地需要探测协会的超常匹配步骤。 本文我们介绍SimTrack 以简化手工制作的跟踪模式, 提议一个从原始云中联合探测和跟踪的端到端培训模型。 我们的关键设计是预测每个对象在给定的片段中首次出现的位置, 以获得跟踪身份, 然后根据运动估计更新位置 。 在推断中, 超常匹配步骤可以通过简单的读出操作完全放弃 。 SimTracack 将跟踪对象关联、 新生儿物体检测和死轨杀死整合到一个单一的统一模型中。 我们对两个大型数据集( nuScenes 和 Waymo Open Dataset) 进行广泛的评估。 实验结果显示, 我们的简单方法在排除超标定规则的同时, 与最先进的方法相比, 比较优于最先进的方法 。