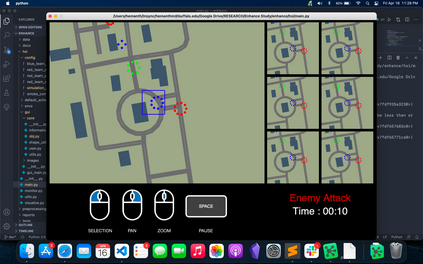
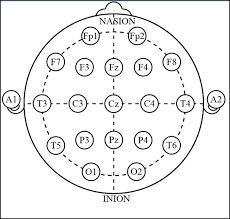
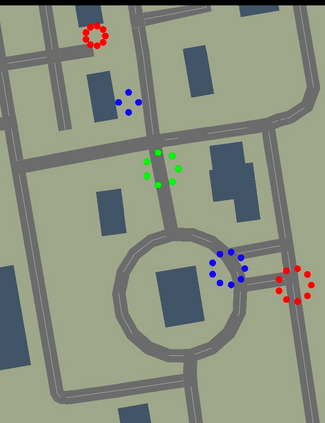
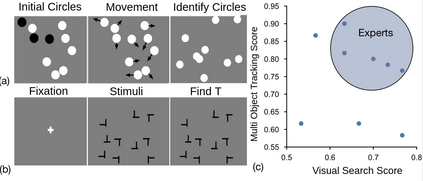
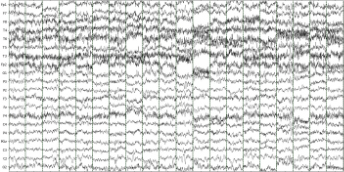
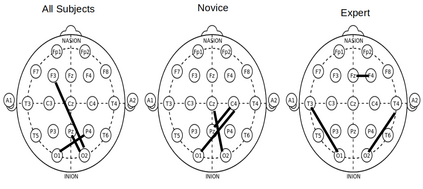
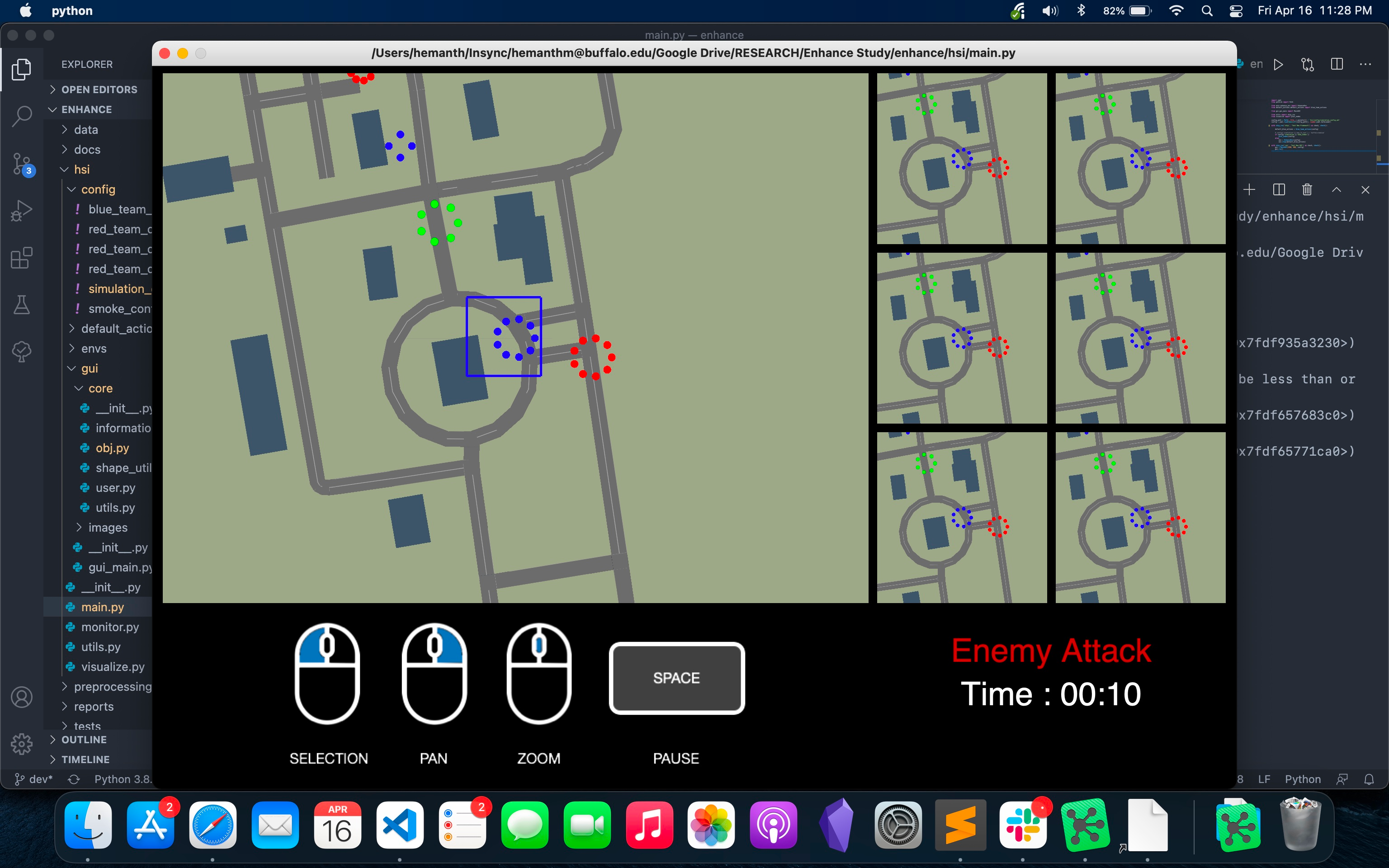
Human-swarm interaction has recently gained attention due to its plethora of new applications in disaster relief, surveillance, rescue, and exploration. However, if the task difficulty increases, the performance of the human operator decreases, thereby decreasing the overall efficacy of the human-swarm team. Thus, it is critical to identify the task difficulty and adaptively allocate the task to the human operator to maintain optimal performance. In this direction, we study the classification of task difficulty in a human-swarm interaction experiment performing a target search mission. The human may control platoons of unmanned aerial vehicles (UAVs) and unmanned ground vehicles (UGVs) to search a partially observable environment during the target search mission. The mission complexity is increased by introducing adversarial teams that humans may only see when the environment is explored. While the human is completing the mission, their brain activity is recorded using an electroencephalogram (EEG), which is used to classify the task difficulty. We have used two different approaches for classification: A feature-based approach using coherence values as input and a deep learning-based approach using raw EEG as input. Both approaches can classify the task difficulty well above the chance. The results showed the importance of the occipital lobe (O1 and O2) coherence feature with the other brain regions. Moreover, we also study individual differences (expert vs. novice) in the classification results. The analysis revealed that the temporal lobe in experts (T4 and T3) is predominant for task difficulty classification compared with novices.
翻译:最近,由于在救灾、监视、救援和探索方面应用的人类暖化互动量过多,最近引起人们的关注。然而,如果任务难度增加,人类操作员的性能就会下降,从而降低人类暖化团队的总体效率。因此,关键是要确定任务难度,并适应性地将任务分配给人类操作员,以保持最佳性能。在这方面,我们研究执行目标搜索任务的人类暖化互动实验中任务难度的分类。在目标搜索任务期间,人类可能控制无人驾驶航空飞行器(UAVs)和无人驾驶地面飞行器(UGVs)的排,以寻找部分可观测的环境。如果任务困难增加,则人类操作员的性能下降,从而降低任务的复杂性,因为人类只能在探索环境时才能看到对抗小组。在完成任务时,他们的大脑活动使用电脑图(EEEEG)记录,用于对任务难度进行分类。我们采用了两种不同的分类方法:使用一致性的分类方法,将无人驾驶飞行器(UAV)和无人驾驶地面飞行器(UGVs)的排排排排排,以查找环境环境环境环境环境环境环境环境环境。任务的复杂性增加。通过引入对抗方法将任务的难度与Oclexlexxxxxxxxxxxxxxxxxxxxxxx