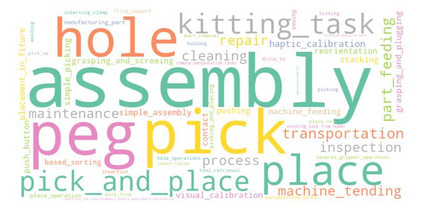
The research community is puzzled with words like skill, action, atomic unit and others when describing robots' capabilities. However, for giving the possibility to integrate capabilities in industrial scenarios, a standardization of these descriptions is necessary. This work uses a structured review approach to identify commonalities and differences in the research community of robots' skill frameworks. Through this method, 210 papers were analyzed and three main results were obtained. First, the vast majority of authors agree on a taxonomy based on task, skill and primitive. Second, the most investigated robots' capabilities are pick and place. Third, industrial oriented applications focus more on simple robots' capabilities with fixed parameters while ensuring safety aspects. Therefore, this work emphasizes that a taxonomy based on task, skill and primitives should be used by future works to align with existing literature. Moreover, further research is needed in the industrial domain for parametric robots' capabilities while ensuring safety.
翻译:在描述机器人的能力时,研究界对诸如技能、行动、原子单位等词语感到迷惑不解。然而,为了有可能将能力纳入工业情景,有必要对这些描述进行标准化。这项工作采用结构化的审查方法,以确定机器人技能框架研究界的共性和差异。通过这种方法,分析了210篇论文并取得了三个主要结果。首先,绝大多数作者根据任务、技能和原始能力就分类法达成一致。第二,调查最多的机器人的能力是选取和定位。第三,工业应用更侧重于具有固定参数的简单机器人的能力,同时确保安全方面。因此,这项工作强调,今后的工作应当使用基于任务、技能和原始的分类法,以便与现有文献保持一致。此外,还需要在工业领域进一步研究参数机器人的能力,同时确保安全。