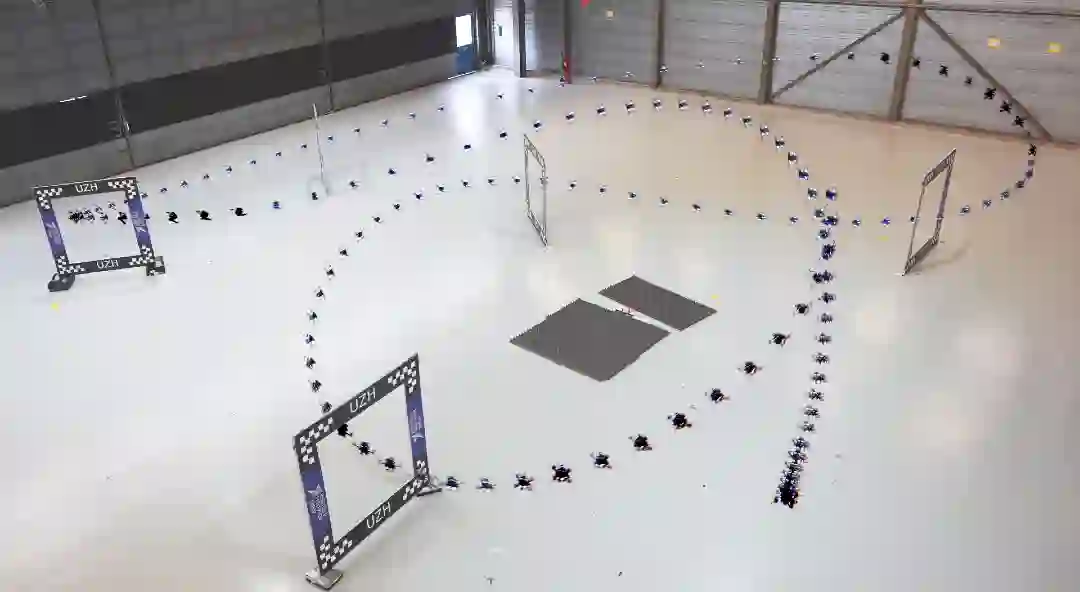
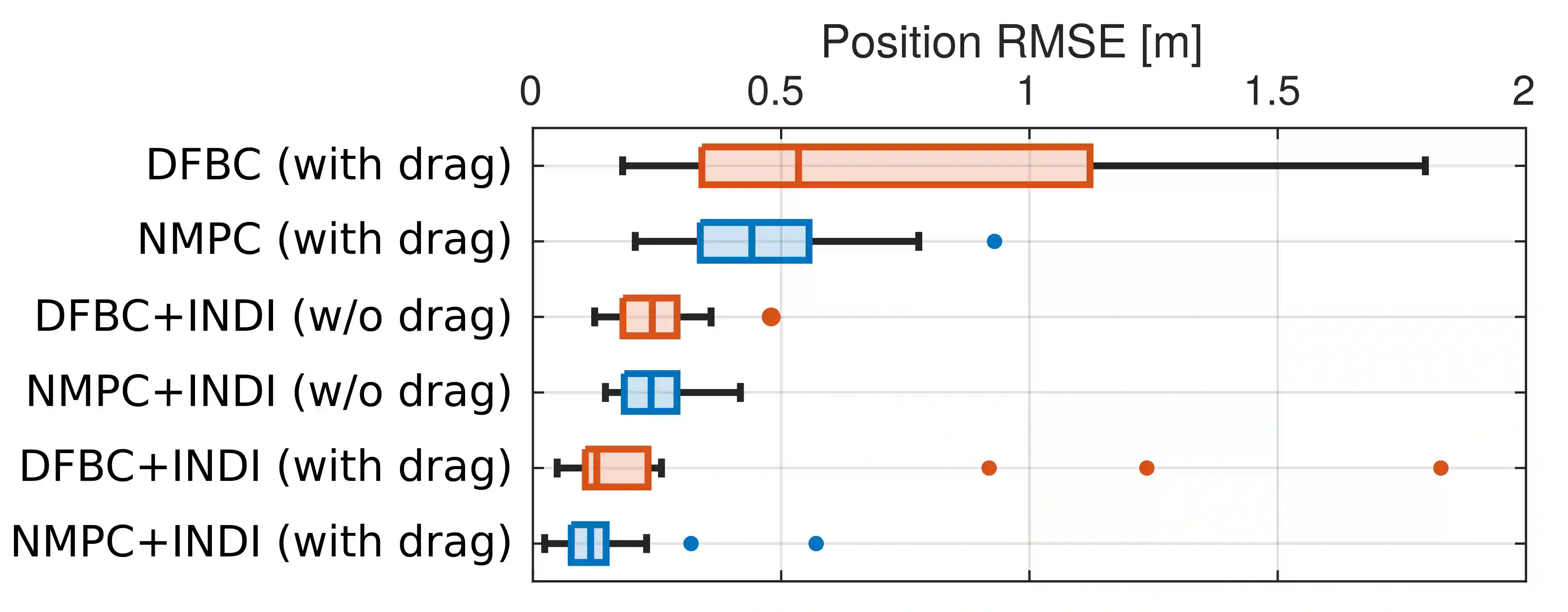
Accurate trajectory tracking control for quadrotors is essential for safe navigation in cluttered environments. However, this is challenging in agile flights due to nonlinear dynamics, complex aerodynamic effects, and actuation constraints. In this article, we empirically compare two state-of-the-art control frameworks: the nonlinear-model-predictive controller (NMPC) and the differential-flatness-based controller (DFBC), by tracking a wide variety of agile trajectories at speeds up to 72 km/h. The comparisons are performed in both simulation and real-world environments to systematically evaluate both methods from the aspect of tracking accuracy, robustness, and computational efficiency. We show the superiority of NMPC in tracking dynamically infeasible trajectories, at the cost of higher computation time and risk of numerical convergence issues. For both methods, we also quantitatively study the effect of adding an inner-loop controller using the incremental nonlinear dynamic inversion (INDI) method, and the effect of adding an aerodynamic drag model. Our real-world experiments, performed in one of the world's largest motion capture systems, demonstrate more than 78% tracking error reduction of both NMPC and DFBC, indicating the necessity of using an inner-loop controller and aerodynamic drag model for agile trajectory tracking.
翻译:精确跟踪孔径轨道控制对于在杂乱环境中进行安全导航至关重要。 然而,由于非线性动态、复杂的空气动力效应和动作限制,这在灵活飞行方面具有挑战性,因为非线性动态、复杂的空气动力效应和电算效率方面的限制。在本篇文章中,我们从经验上比较了两种最先进的控制框架:非线性模型预测控制(NMPC)和基于微缩度的控制(DFBC),通过跟踪各种速度高达72公里/小时的灵活轨迹控制(DFBC)。在模拟和现实世界环境中进行比较,以便从跟踪准确性、稳健性和计算效率这两个方面系统地评估方法。我们展示了NMPC在跟踪动态不可行的轨迹方面的优势,以更高的计算时间和数字趋同问题的风险为代价。对于这两种方法,我们还从数量上研究使用递增的非线性动态动态转换(INDI)方法添加内环控控制器的影响,以及添加一个空气动力拖动模型的效果。我们真实世界的实验,在跟踪动态性轨道上对NBC的最大速度的轨迹定位系统进行的一种跟踪,以显示世界最大程度的精确定位系统。