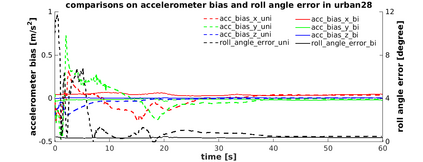
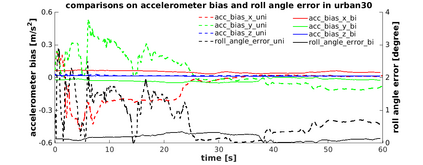
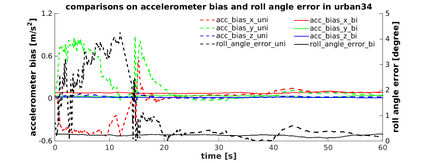
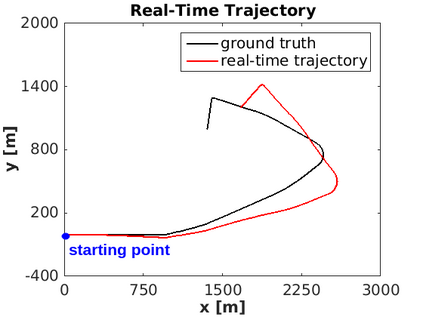
Odometer-aided visual-inertial SLAM systems typically have a good performance for navigation of wheeled platforms, while they usually suffer from degenerate cases before the first turning. In this paper, firstly we perform an observability analysis w.r.t. the extrinsic parameters before the first turning, which is a complement of the existing results of observability analyses. Secondly, inspired by the above observability analyses, we propose a bidirectional trajectory computation method, by which the poses before the first turning are refined in the backward computation thread, and the real-time trajectory is adjusted accordingly. Experimental results prove that our proposed method not only solves the problem of the unobservability of accelerometer bias and extrinsic parameters before the first turning, but also results in more accurate trajectories in comparison with the state-of-the-art approaches.
翻译:由仪表辅助的视觉-内脏 SLM 系统通常对轮式平台的导航具有良好的性能,而它们通常在第一次转弯前会遇到退化的情况。 在本文中,我们首先对第一次转弯前的外部参数进行了可观察性分析,这是观察性分析现有结果的补充。 其次,在以上观察性分析的启发下,我们提出了一个双向轨道计算方法,根据这种方法,在第一次转弯前形成的情况将改进为后向计算线,并相应调整实时轨迹。 实验结果证明,我们提出的方法不仅在第一次转弯前解决了加速仪偏差和外向参数不易观测的问题,而且与最先进的方法相比,还产生了更准确的轨迹。