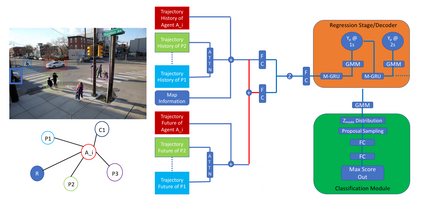
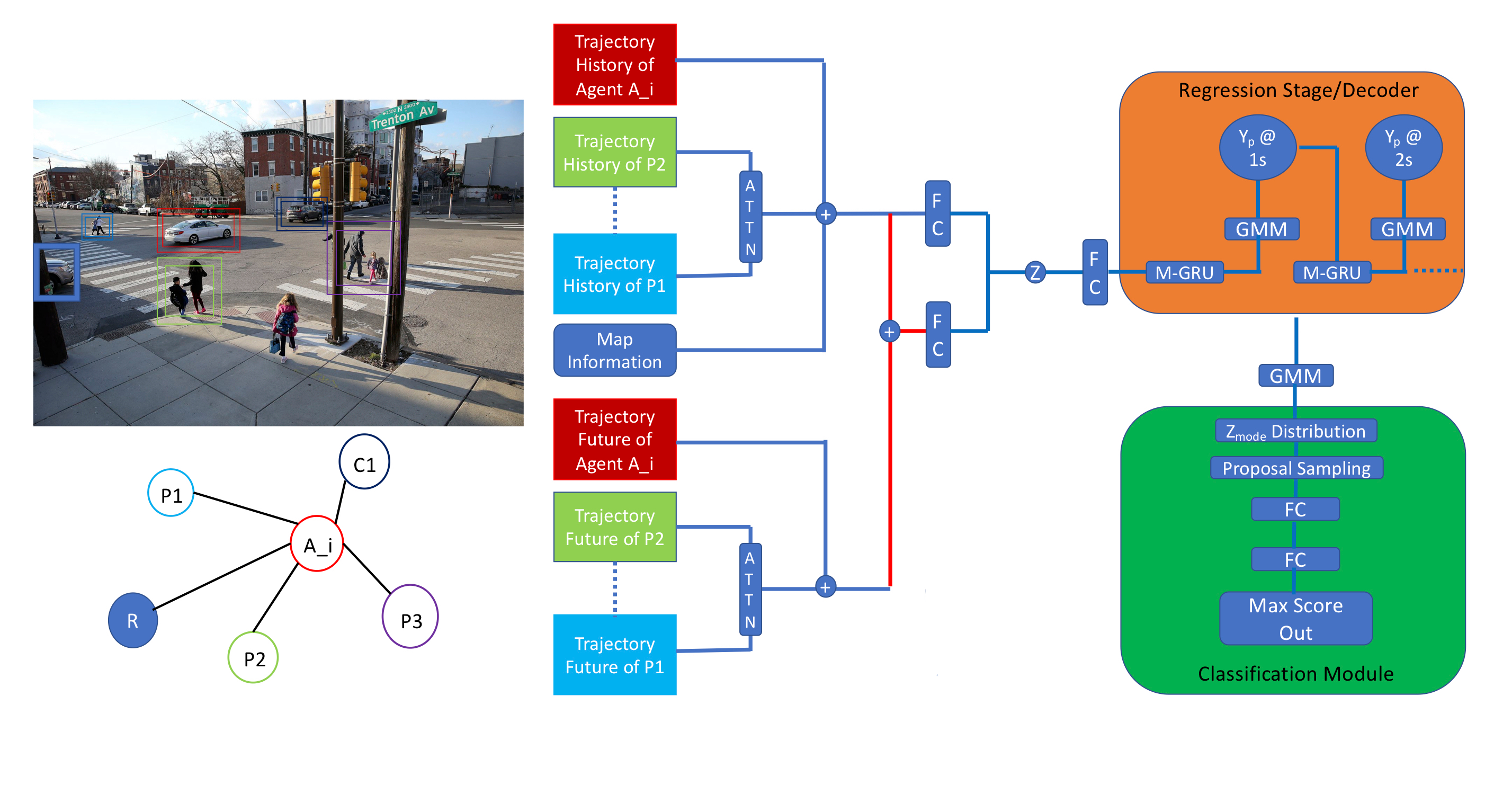
Making accurate motion prediction of surrounding agents such as pedestrians and vehicles is a critical task when robots are trying to perform autonomous navigation tasks. Recent research on multi-modal trajectory prediction, including regression and classification approaches, perform very well at short-term prediction. However, when it comes to long-term prediction, most Long Short-Term Memory (LSTM) based models tend to diverge far away from the ground truth. Therefore, in this work, we present a two-stage framework for long-term trajectory prediction, which is named as Long-Term Network (LTN). Our Long-Term Network integrates both the regression and classification approaches. We first generate a set of proposed trajectories with our proposed distribution using a Conditional Variational Autoencoder (CVAE), and then classify them with binary labels, and output the trajectories with the highest score. We demonstrate our Long-Term Network's performance with experiments on two real-world pedestrian datasets: ETH/UCY, Stanford Drone Dataset (SDD), and one challenging real-world driving forecasting dataset: nuScenes. The results show that our method outperforms multiple state-of-the-art approaches in long-term trajectory prediction in terms of accuracy.
翻译:在机器人试图执行自主导航任务时,准确预测行人和车辆等周围物剂的运动预测是一项关键任务。最近对多模式轨迹预测(包括回归和分类方法)的研究在短期预测方面表现良好。然而,在长期预测方面,基于大多数长期短期内存(LSTM)模型往往与地面真理相去甚远。因此,在这项工作中,我们提出了一个长期轨迹预测的两阶段框架,称为长期网络(LTN)。我们的长期网络结合了回归和分类方法。我们首先利用一个配置性自动自动转换器(CVAE)生成了一套拟议分布的轨迹,然后用二进制标签进行分类,然后以最高分输出轨道。我们展示了我们长期网络在两个真实行人数据集(ET/CUCY, Stepton Drone Droone数据集(SDD))上进行实验的绩效,以及一个具有挑战性的实际驱动数据集:多轨迹预测方法(NEVA-CE-CE)中显示我们长期预测方法的结果。