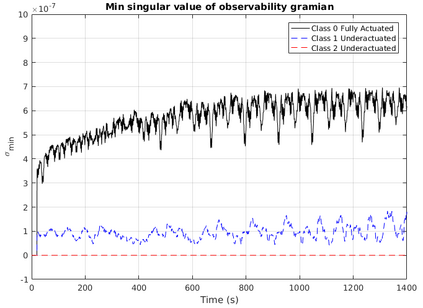
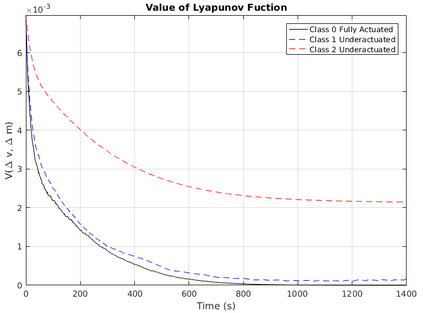
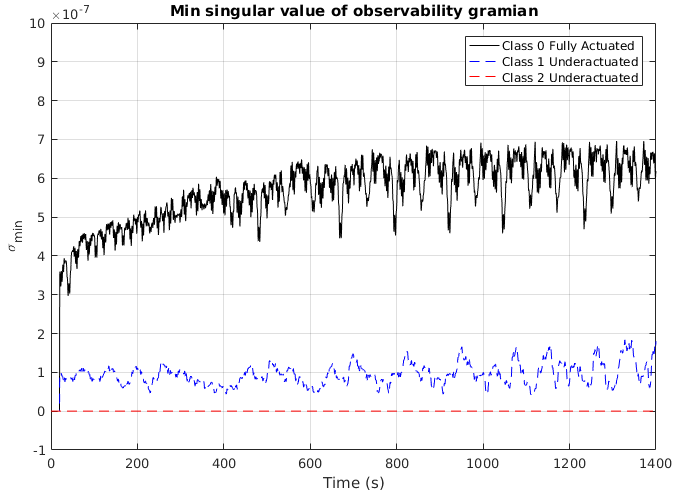
This paper addresses the long-standing open problem of observability of mass and inertia plant parameters in the adaptive identification (AID) of second-order nonlinear models of 6 degree-of-freedom rigid-body dynamical systems subject to externally applied forces and moments. Although stable methods for AID of plant parameters for this class of systems, as well numerous approaches to stable model-based direct adaptive trajectory-tracking control of such systems, have been reported, these studies have been unable to prove analytically that the adaptive parameter estimates converge to the true plant parameter values. This paper reports necessary and sufficient conditions for the uniform complete observability (UCO) of 6-DOF plant inertial parameters for a stable adaptive identifier for this class of systems. When the UCO condition is satisfied, the adaptive parameter estimates are shown to converge to the true plant parameter values. To the best of our knowledge this is the first reported proof for this class of systems of UCO of plant parameters and for convergence of adaptive parameter estimates to true parameter values. We also report a numerical simulation study of this AID approach which shows that (a) the UCO condition can be met for fully-actuated plants as well as underactuated plants with the proper choice of control input and (b) convergence of adaptive parameter estimates to the true parameter values. We conjecture that this approach can be extended to include other parameters that appear rigid body plant models including parameters for drag, buoyancy, added mass, bias, and actuators.
翻译:本文论述在受外部应用力量和时段制约的6度自由僵硬体动态系统的第二阶非线性非线性模型的适应性识别(AID)中,质量和惯性植物参数的可观测性的长期公开问题。虽然已经报告了这类系统的AID工厂参数的稳定方法,以及稳定基于模型的直接适应性直接轨迹跟踪控制这些系统的许多方法,但这些研究未能从分析上证明适应性参数估计数与真正的植物参数值相一致。本文报告6-DOF工厂惯性参数的统一完全可观测性(UCO)6-DOF工厂惯性参数的必要和充分条件,以便为这类系统提供一个稳定的适应性标识。当UCO条件得到满足时,适应性参数估计数显示与真正的植物参数值一致。据我们所知,这是UCO植物参数和适应性参数模型估计与真实参数值一致的第一个报告证据。我们还报告了这一AID方法的数值模拟研究,该方法表明:(a)UCO条件可以满足,包括完全活化的动力动力动力动力动力动力动力学的精确度方法,从我们看,可以满足这个精确的精确的动力动力动力动力学的模型。