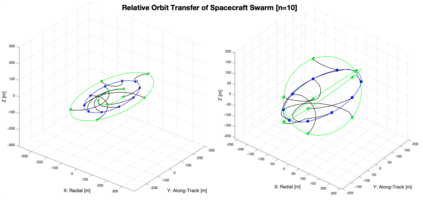
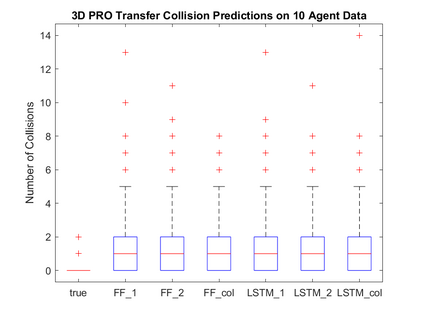
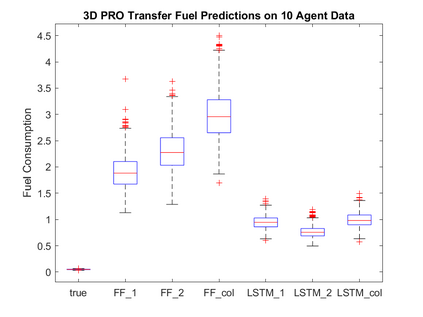
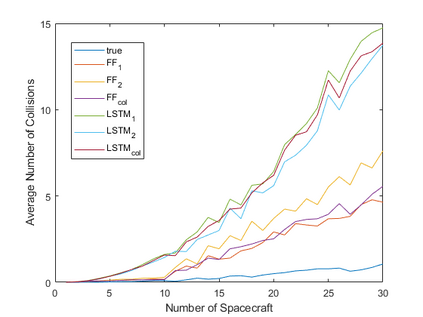
In this paper we describe a machine learning based framework for spacecraft swarm trajectory planning. In particular, we focus on coordinating motions of multi-spacecraft in formation flying through passive relative orbit(PRO) transfers. Accounting for spacecraft dynamics while avoiding collisions between the agents makes spacecraft swarm trajectory planning difficult. Centralized approaches can be used to solve this problem, but are computationally demanding and scale poorly with the number of agents in the swarm. As a result, centralized algorithms are ill-suited for real time trajectory planning on board small spacecraft (e.g. CubeSats) comprising the swarm. In our approach a neural network is used to approximate solutions of a centralized method. The necessary training data is generated using a centralized convex optimization framework through which several instances of the n=10 spacecraft swarm trajectory planning problem are solved. We are interested in answering the following questions which will give insight on the potential utility of deep learning-based approaches to the multi-spacecraft motion planning problem: 1) Can neural networks produce feasible trajectories that satisfy safety constraints (e.g. collision avoidance) and low in fuel cost? 2) Can a neural network trained using n spacecraft data be used to solve problems for spacecraft swarms of differing size?
翻译:在本文中,我们描述一个基于机器学习的航天器群温轨道规划框架。特别是,我们侧重于协调多航天器在编织过程中通过被动相对轨道(PRO)转移飞行的动作。计算航天器动态,同时避免航天器群温轨道碰撞,使航天器群温轨道规划难于进行。集中化的方法可用于解决这一问题,但与群温中的物剂数量相比,在计算上要求和规模不高。因此,中央算法不适合在组成群温的小型航天器(例如CubeSats)上实时进行轨迹规划。在我们的做法中,神经网络用于大约解决集中方法。必要的培训数据是利用集中的螺旋优化框架生成的,通过这个框架解决了N=10航天器群温轨规划问题的若干实例。我们有兴趣回答以下问题,以深入学习为基础的方法对多航天器运动规划问题的潜在效用:1)神经网络能够产生可行的轨迹,满足安全限制(例如避免碰撞)和低燃料成本的航天器使用一个经过培训的神经网络,能够利用不同规模的数据分辨率解决吗?2 使用一个经过培训的神经网络,使用不同规模的航天器的磁体解系统问题可以用来解决不同规模?