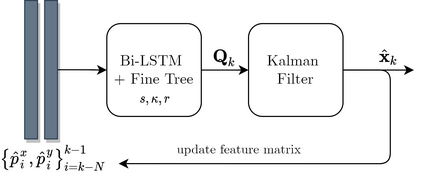
The linear Kalman filter is commonly used for vehicle tracking. This filter requires knowledge of the vehicle trajectory and the statistics of the system and measurement models. In real-life scenarios, prior assumptions made while determining those models do not hold. As a consequence, the overall filter performance degrades and in some situations the estimated states diverge. To overcome the uncertainty in the {vehicle kinematic} trajectory modeling, additional artificial process noise may be added to the model or different types of adaptive filters may be employed. This paper proposes {a hybrid} adaptive Kalman filter based on {model and} machine learning algorithms. First, recurrent neural networks are employed to learn the vehicle's geometrical and kinematic features. In turn, those features are plugged into a supervised learning model, thereby providing the actual process noise covariance to be used in the Kalman framework. The proposed approach is evaluated and compared to six other adaptive filters using the Oxford RobotCar dataset. The proposed framework can be implemented in other estimation problems to accurately determine the process noise covariance in real-time scenarios.
翻译:直线 Kalman 过滤器通常用于车辆跟踪。 此过滤器需要了解车辆轨迹以及系统和测量模型的统计。 在现实生活中, 先前在确定这些模型时所作的假设是站不住脚的。 因此, 总体过滤性能会下降, 在某些情况下, 估计状态会有所不同。 为了克服{ 汽车运动} 轨迹模型中的不确定性, 可能会在模型中添加额外的人工工艺噪音, 或者使用不同的适应性过滤器。 本文提议根据{ 模型和} 机器学习算法来 { 混合} 适应性 Kalman 过滤器。 首先, 使用经常性神经网络来学习飞行器的几何和运动性特征。 这些特征被插入到一个受监督的学习模型中, 从而提供将在卡尔曼框架中使用的实际过程噪声变量。 对拟议方法进行评估, 并与使用牛津机器人Car 数据集的另外6个适应性过滤器进行比较。 在其他估计问题中, 拟议的框架可以实施, 以准确确定实时情景中的进程噪声。