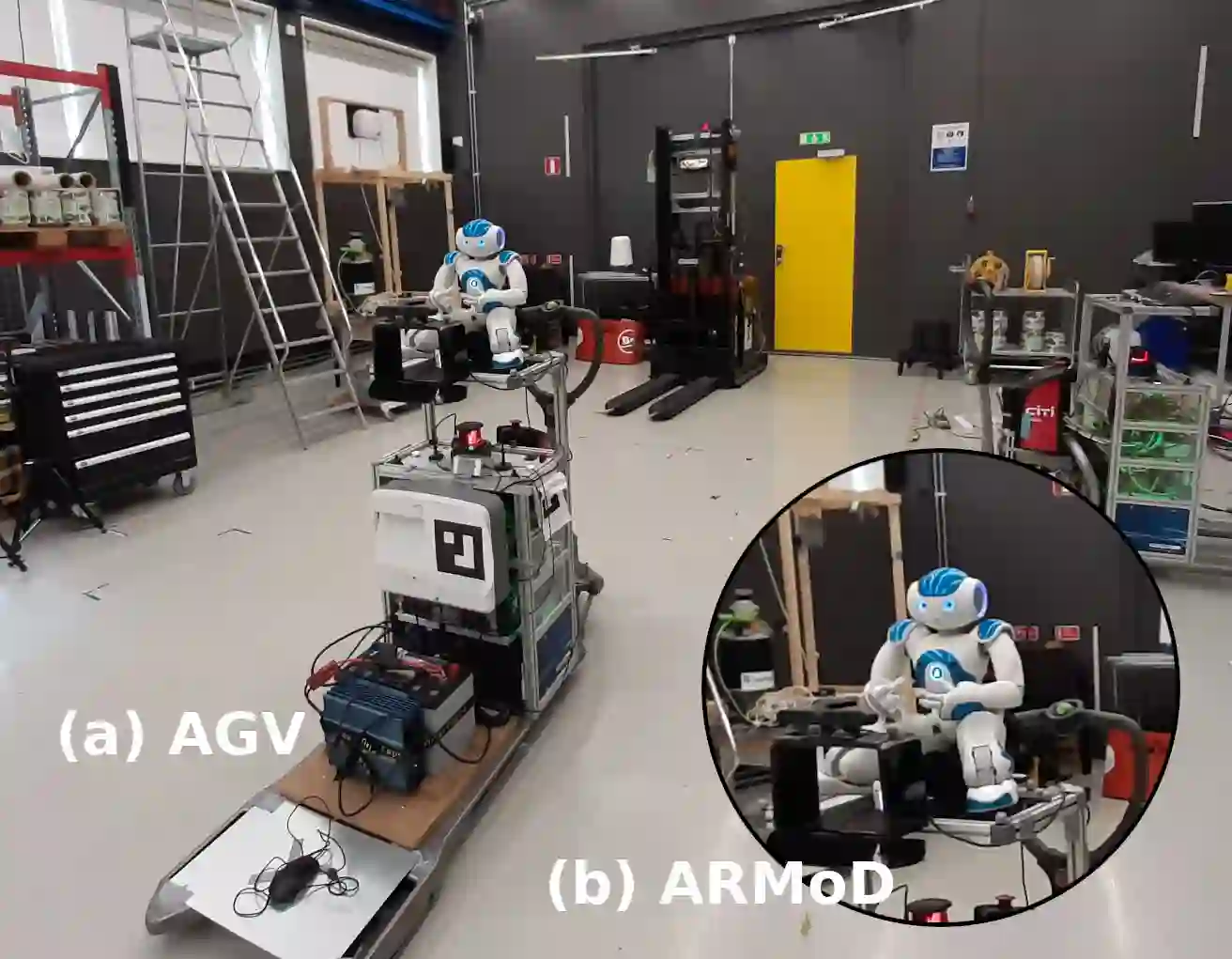
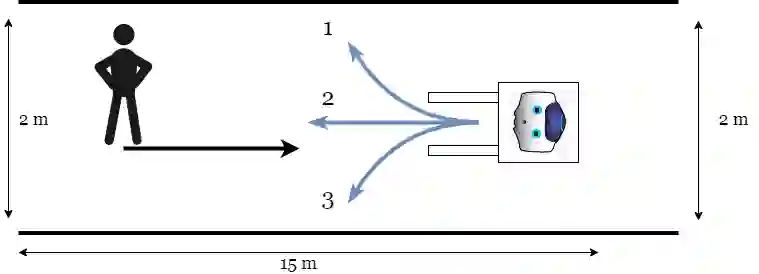
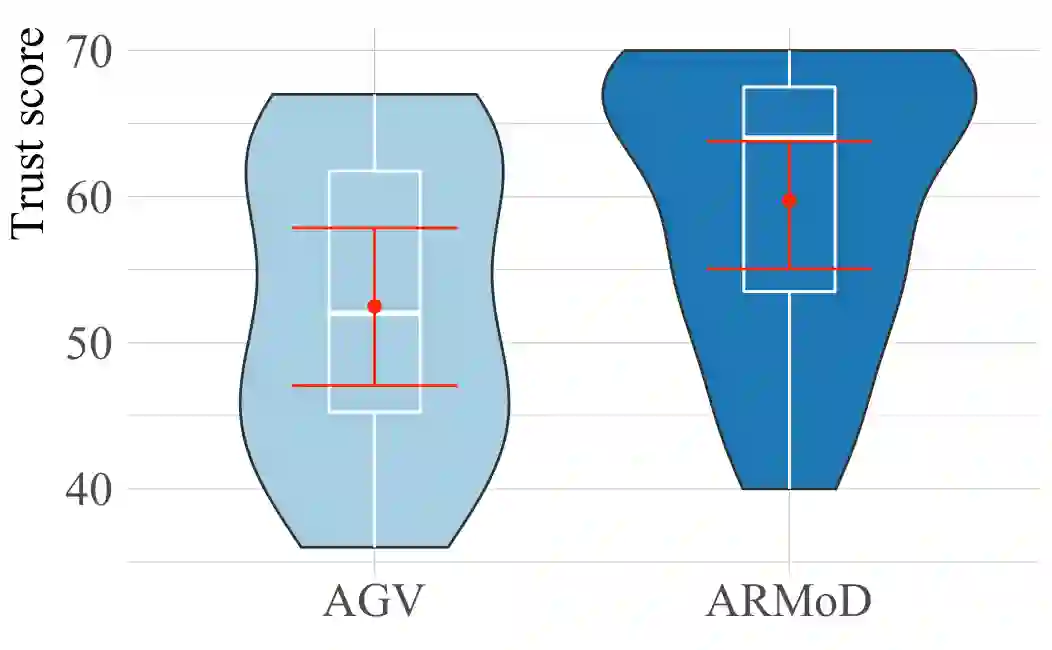
Robots are increasingly deployed in spaces shared with humans, including home settings and industrial environments. In these environments, the interaction between humans and robots (HRI) is crucial for safety, legibility, and efficiency. A key factor in HRI is trust, which modulates the acceptance of the system. Anthropomorphism has been shown to modulate trust development in a robot, but robots in industrial environments are not usually anthropomorphic. We designed a simple interaction in an industrial environment in which an anthropomorphic mock driver (ARMoD) robot simulates to drive an autonomous guided vehicle (AGV). The task consisted of a human crossing paths with the AGV, with or without the ARMoD mounted on the top, in a narrow corridor. The human and the system needed to negotiate trajectories when crossing paths, meaning that the human had to attend to the trajectory of the robot to avoid a collision with it. There was a significant increment in the reported trust scores in the condition where the ARMoD was present, showing that the presence of an anthropomorphic robot is enough to modulate the trust, even in limited interactions as the one we present here.
翻译:机器人越来越多地部署在与人类共享的空间, 包括家庭设置和工业环境。 在这些环境中, 人类和机器人之间的相互作用对于安全、 清晰度和效率至关重要 。 HRI 中的一个关键因素是信任, 它调节了对系统的接受。 人类形态学已经证明可以调节机器人的信任发展, 但工业环境中的机器人通常不是人类形态。 我们设计了一个简单的互动。 在工业环境中, 一个人类形态模拟的模拟驱动器( ARMOD) 机器人模拟来驾驶自主制导飞行器( AGV ) 。 任务包括人与AGV 的交叉路径, 不论是否安装在顶部, 在狭小的走廊上方。 当跨轨时, 人类和系统需要谈判轨迹, 这意味着人类必须注意机器人的轨迹以避免与机器人相撞。 所报告的信任分数明显增加, 这表明我们这里的人类形态机器人的存在足以调节信任, 即使是在有限的互动中。