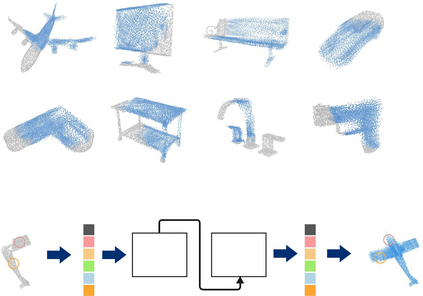
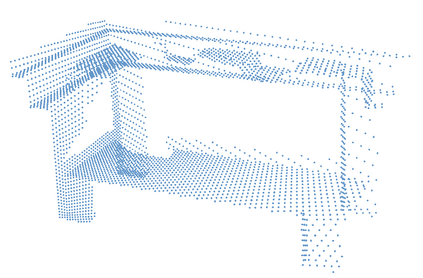
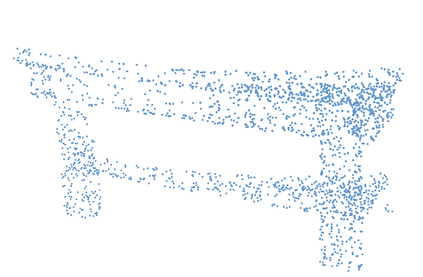
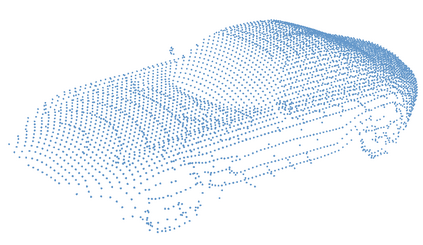
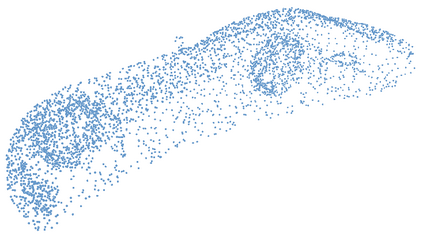
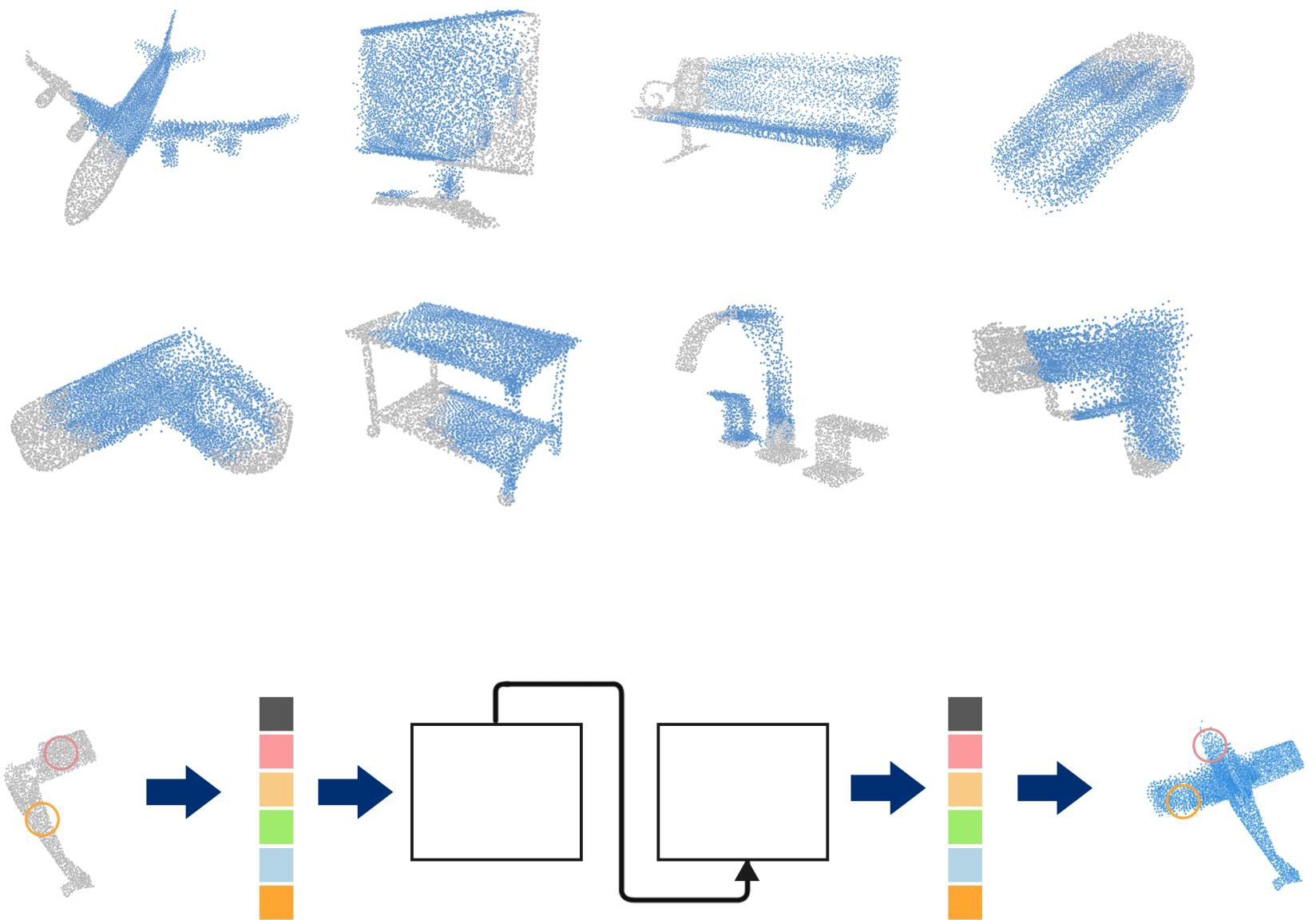
In this paper, we present a new method that reformulates point cloud completion as a set-to-set translation problem and design a new model, called PoinTr, which adopts a Transformer encoder-decoder architecture for point cloud completion. By representing the point cloud as a set of unordered groups of points with position embeddings, we convert the input data to a sequence of point proxies and employ the Transformers for generation. To facilitate Transformers to better leverage the inductive bias about 3D geometric structures of point clouds, we further devise a geometry-aware block that models the local geometric relationships explicitly. The migration of Transformers enables our model to better learn structural knowledge and preserve detailed information for point cloud completion. Taking a step towards more complicated and diverse situations, we further propose AdaPoinTr by developing an adaptive query generation mechanism and designing a novel denoising task during completing a point cloud. Coupling these two techniques enables us to train the model efficiently and effectively: we reduce training time (by 15x or more) and improve completion performance (over 20%). We also show our method can be extended to the scene-level point cloud completion scenario by designing a new geometry-enhanced semantic scene completion framework. Extensive experiments on the existing and newly-proposed datasets demonstrate the effectiveness of our method, which attains 6.53 CD on PCN, 0.81 CD on ShapeNet-55 and 0.392 MMD on real-world KITTI, surpassing other work by a large margin and establishing new state-of-the-arts on various benchmarks. Most notably, AdaPoinTr can achieve such promising performance with higher throughputs and fewer FLOPs compared with the previous best methods in practice. The code and datasets are available at https://github.com/yuxumin/PoinTr
翻译:在本文中,我们展示了一种新的方法,将云的完成点重新定位为设定到设定的翻译问题,并设计了一个新的模型,称为PoinTr,该模型采用了一个用于点云完成点的变换器编码器-解码器结构。通过将点云作为一组未排序的嵌入点组,我们将输入数据转换成一组点轴轴,并使用变换器来生成。为了帮助变换器更好地利用3D 点云的平面结构的感测偏差,我们进一步设计了一个地理测量特征块,以明确模拟当地的实际几何关系。变换器的迁移使我们的模型能够更好地学习结构知识,并为点云完成点保存详细的信息。我们进一步提出AdaPoinTr,为此开发了一个适应性查询生成机制,并在完成点云层云中设计了一个新的分解任务。 使用这两种技术可以高效和有效地培训模型:我们减少培训时间(以15x或以上的速度),并改进了完成当地实际实践的性能(超过20 % ) 。我们还展示了我们的方法可以通过新的平面的平流数据,通过新的平流模型来展示新的平面数据。