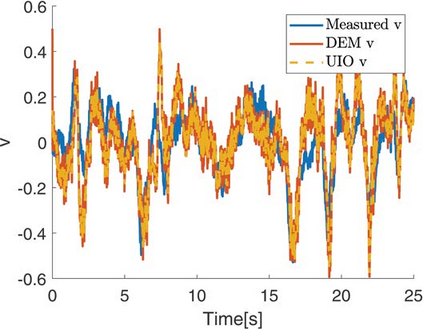
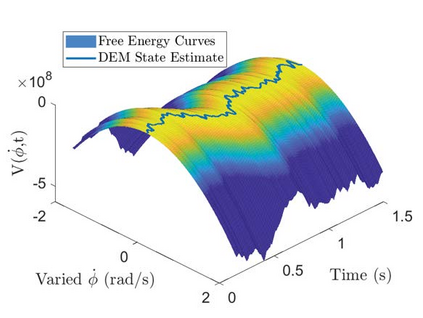
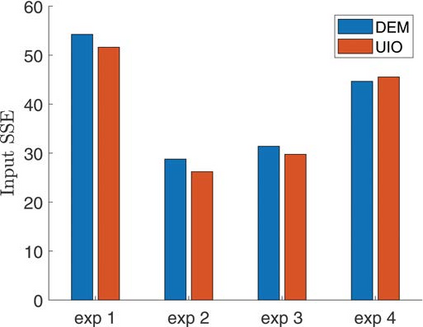
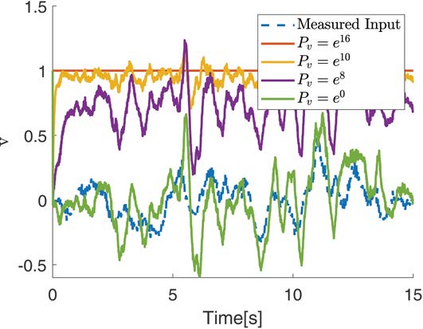
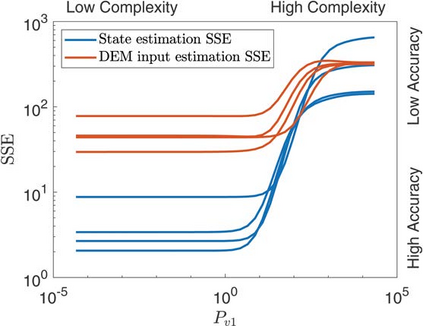
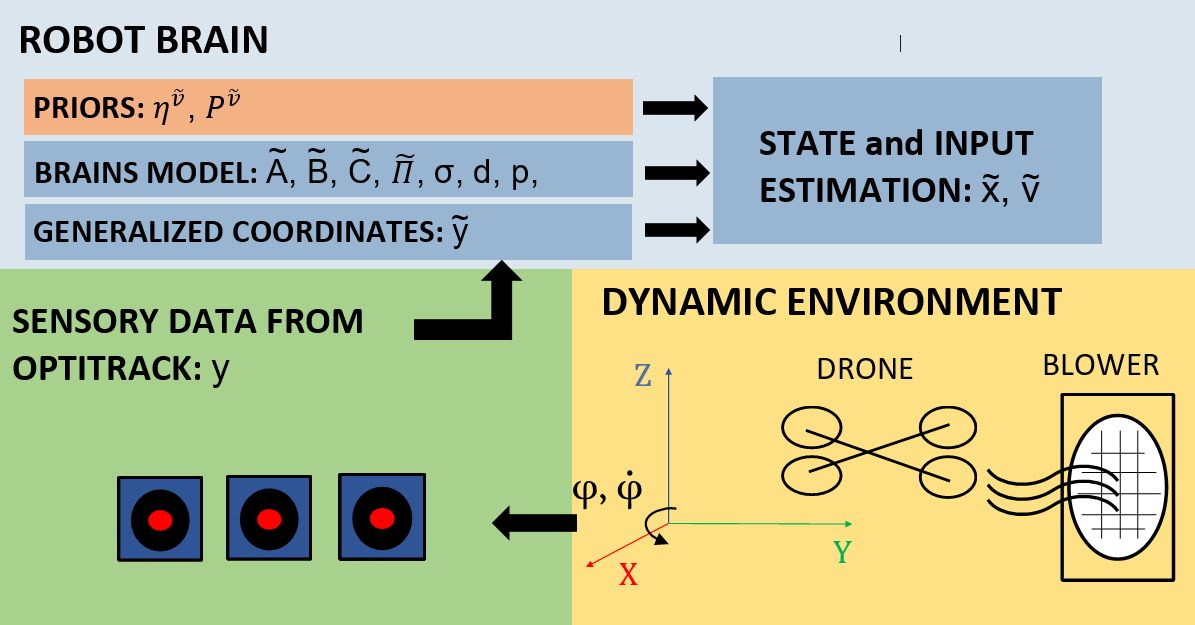
The free energy principle from neuroscience provides a brain-inspired perception scheme through a data-driven model learning algorithm called Dynamic Expectation Maximization (DEM). This paper aims at introducing an experimental design to provide the first experimental confirmation of the usefulness of DEM as a state and input estimator for real robots. Through a series of quadcopter flight experiments under unmodelled wind dynamics, we prove that DEM can leverage the information from colored noise for accurate state and input estimation through the use of generalized coordinates. We demonstrate the superior performance of DEM for state estimation under colored noise with respect to other benchmarks like State Augmentation, SMIKF and Kalman Filtering through its minimal estimation error. We demonstrate the similarities in the performance of DEM and Unknown Input Observer (UIO) for input estimation. The paper concludes by showing the influence of prior beliefs in shaping the accuracy-complexity trade-off during DEM's estimation.
翻译:神经科学的自由能源原则通过称为动态预期最大化(DEM)的数据驱动模型学习算法,提供了大脑启发的感知机制。本文旨在引入一个实验性设计,首次实验性地确认DEM作为真实机器人的状态和输入估计器的效用。通过在未经模拟的风力动态下进行的一系列四氯二苯飞行实验,我们证明DEM能够利用彩色噪音的信息,通过使用通用坐标进行准确的状态和输入估计。我们展示了DEM在彩色噪音下进行国家估计的优异性表现,以国家放大、SMIKF和Kalman过滤法等其他基准为基准,通过其最低限度的估计错误。我们展示了DEM和未知输入观察器(UIO)在估计投入时的表现相似性。文件最后展示了先前的信念在德国估算期间形成准确性、兼容性交易的影响。