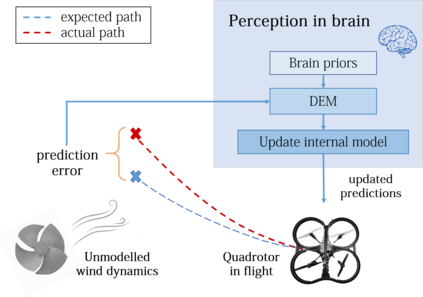
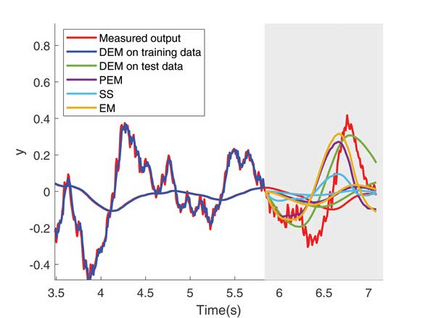
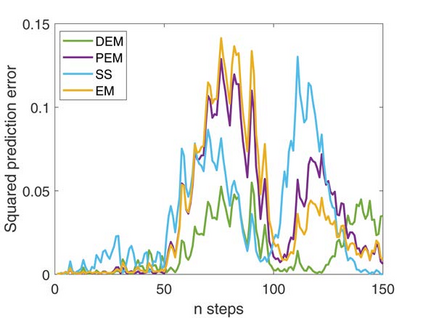
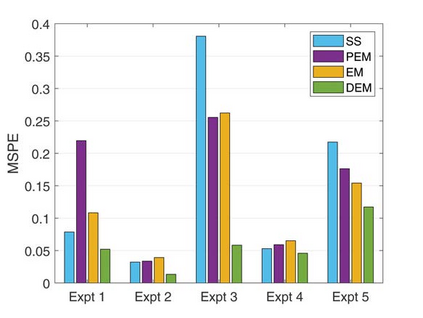
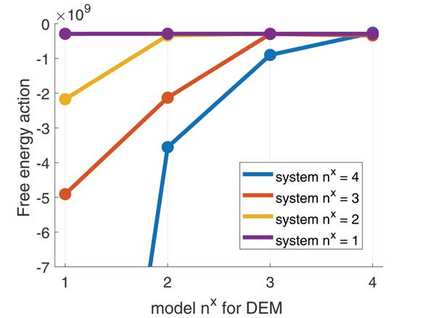
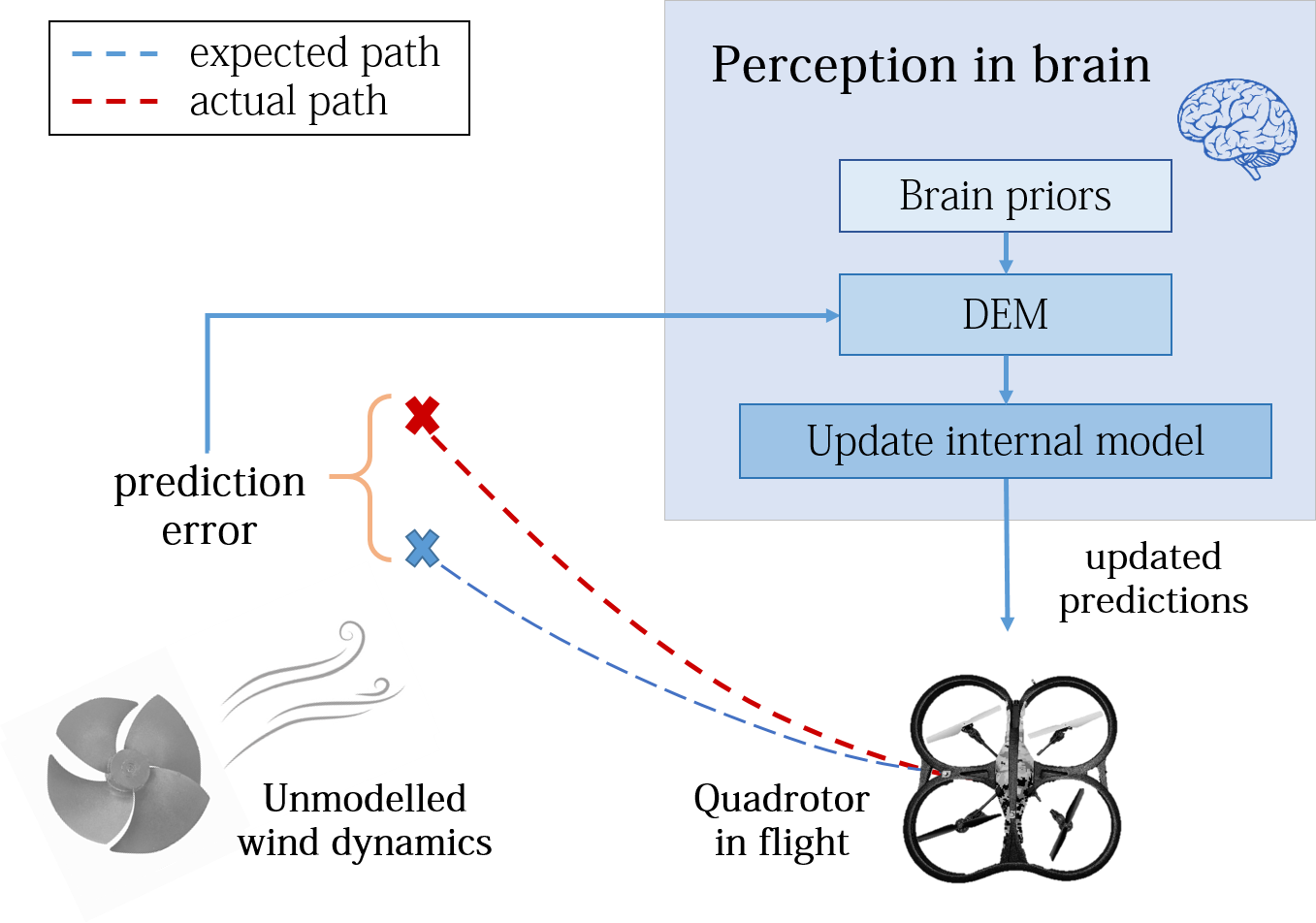
The quest for a brain-inspired learning algorithm for robots has culminated in the free energy principle from neuroscience that models the brain's perception and action as an optimization over its free energy objectives. Based on this idea, we propose an estimation algorithm for accurate output prediction of a quadrotor flying under unmodelled wind conditions. The key idea behind this work is the handling of unmodelled wind dynamics and the model's non-linearity errors as coloured noise in the system, and leveraging it for accurate output predictions. This paper provides the first experimental validation for the usefulness of generalized coordinates for robot perception using Dynamic Expectation Maximization (DEM). Through real flight experiments, we show that the estimator outperforms classical estimators with the least error in output predictions. Based on the experimental results, we extend the DEM algorithm for model order selection for complete black box identification. With this paper, we provide the first experimental validation of DEM applied to robot learning.
翻译:探索由大脑启发的机器人学习算法最终产生了神经科学自由能源原则,该原则将大脑的感知和行动模拟为对其自由能源目标的优化。 基于这一想法,我们提出一个估算算法,用于准确预测在非模拟风力条件下飞行的二次钻探机的产出。 这项工作的关键理念是处理非模拟风力动态和模型的非线性误差,作为系统中的彩色噪音,并利用模型的非线性误差进行精确输出预测。 本文为利用动态预期最大化( DEM)来验证机器人感知通用坐标的效用提供了第一次实验性验证。 通过实际飞行实验, 我们显示测量仪比典型的测算法要优于输出预测中差最小的经典测算器。 基于实验结果, 我们扩展了DM算法, 用于选择完全黑盒识别的模型。 有了这个论文, 我们为机器人学习应用的DM首次实验验证提供了应用的通用坐标的用途。