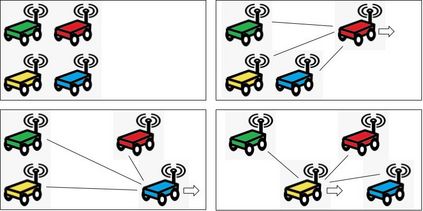
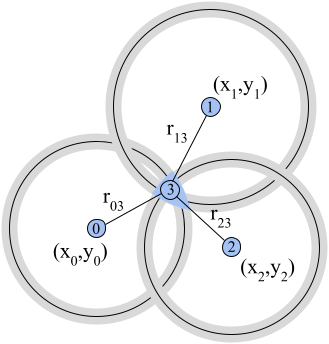
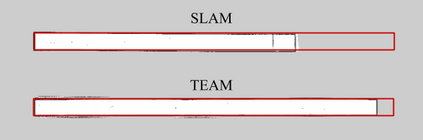
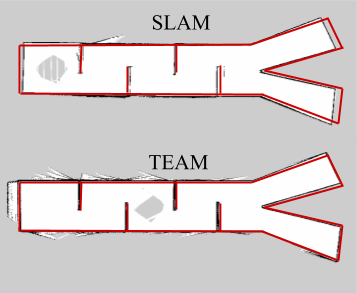
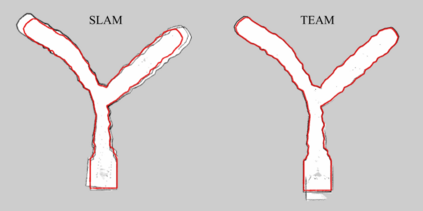
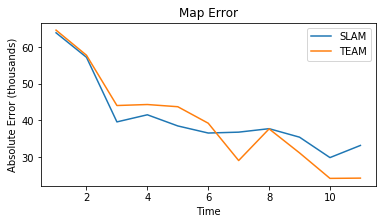
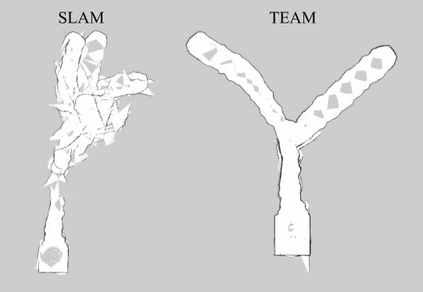
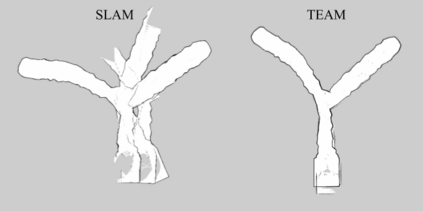
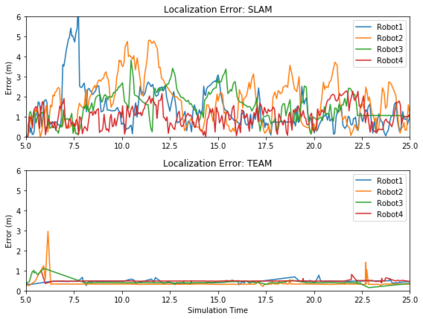
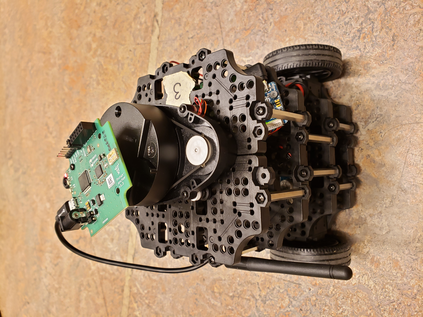
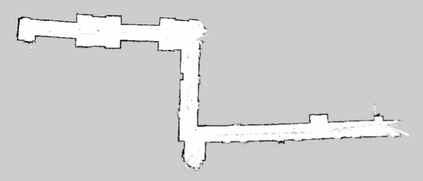
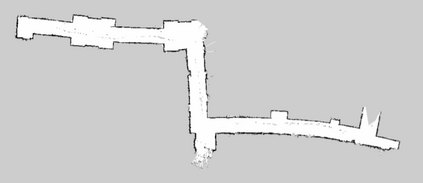
Motivated by lunar exploration, we consider deploying a network of mobile robots to explore an unknown environment while acting as a cooperative positioning system. Robots measure and communicate position-related data in order to perform localization in the absence of infrastructure-based solutions (e.g. stationary beacons or GPS). We present Trilateration for Exploration and Mapping (TEAM), a novel algorithm for low-complexity localization and mapping with robotic networks. TEAM is designed to leverage the capability of commercially-available ultra-wideband (UWB) radios on board the robots to provide range estimates with centimeter accuracy and perform anchorless localization in a shared, stationary frame. It is well-suited for feature-deprived environments, where feature-based localization approaches suffer. We provide experimental results in varied Gazebo simulation environments as well as on a testbed of Turtlebot3 Burgers with Pozyx UWB radios. We compare TEAM to the popular Rao-Blackwellized Particle Filter for Simultaneous Localization and Mapping (SLAM). We demonstrate that TEAM requires an order of magnitude less computational complexity and reduces the necessary sample rate of LiDAR measurements by an order of magnitude. These advantages do not require sacrificing performance, as TEAM reduces the maximum localization error by 50% and achieves up to a 28% increase in map accuracy in feature-deprived environments and comparable map accuracy in other settings.
翻译:在月球探索的推动下,我们考虑部署移动机器人网络,以探索未知的环境,同时作为一个合作定位系统;机器人测量和传播与位置有关的数据,以便在没有基于基础设施的解决办法(如静止信标或全球定位系统)的情况下进行本地化;我们介绍探索和绘图的扩展(TEAM),这是低复杂度本地化和与机器人网络制图的新型算法;TEAM的目的是利用机器人上市的超广频带无线电台的能力,以厘米精确度提供测距估计数,并在一个共同的固定框架内进行无固定定位的本地化;在基于地貌的本地化方法受挫的情况下,这种数据很适合地貌失常的环境;我们提供多种Gazebo模拟环境的实验结果,以及用Pozyx UWB电台测试Turtb3 Burgers的测试台。我们把TEAM与广受欢迎的光度黑化粒子过滤器用于模拟本地化和绘图(SLAM)的设置(SLAM)能力。我们证明,在地貌与地铁定位环境中,需要达到一种最高程度的精确度的本地性测算质量,需要降低当地测算质量的精度,这些测度的精确度的精确度则需要降低。