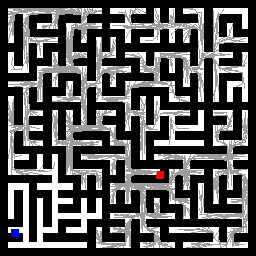
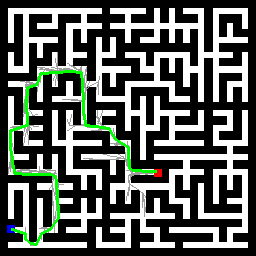
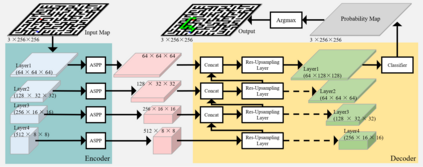
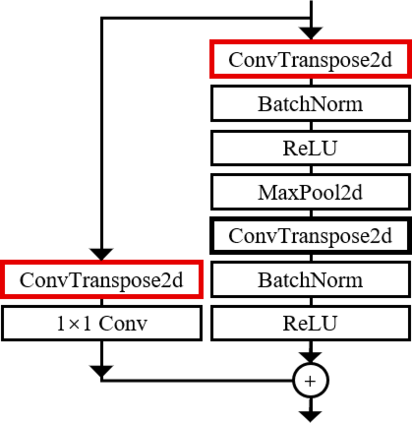
In this paper, we present a novel path planning algorithm to achieve fast path planning in complex environments. Most existing path planning algorithms are difficult to quickly find a feasible path in complex environments or even fail. However, our proposed framework can overcome this difficulty by using a learning-based prediction module and a sampling-based path planning module. The prediction module utilizes an auto-encoder-decoder-like convolutional neural network (CNN) to output a promising region where the feasible path probably lies in. In this process, the environment is treated as an RGB image to feed in our designed CNN module, and the output is also an RGB image. No extra computation is required so that we can maintain a high processing speed of 60 frames-per-second (FPS). Incorporated with a sampling-based path planner, we can extract a feasible path from the output image so that the robot can track it from start to goal. To demonstrate the advantage of the proposed algorithm, we compare it with conventional path planning algorithms in a series of simulation experiments. The results reveal that the proposed algorithm can achieve much better performance in terms of planning time, success rate, and path length.
翻译:在本文中,我们提出了一个新的路径规划算法,以便在复杂环境中实现快速路径规划。 多数现有的路径规划算法很难在复杂环境中快速找到可行的路径, 甚至是失败。 但是, 我们提出的框架可以通过使用基于学习的预测模块和基于取样的路径规划模块来克服这一困难。 预测模块使用一种类似于自动编码解码器- 解码器的共生神经网络( CNN ) 来输出一个有希望的区域, 其中可能存在可行的路径。 在此过程中, 环境被当作一种 RGB 图像, 以输入我们设计的CNN 模块, 而产出也是 RGB 图像 。 不需要额外计算, 以便我们能够保持60 个框架- 秒的高处理速度( PFS ) 。 与基于取样路径的路径规划器相结合, 我们可以从输出图像中提取一条可行的路径, 以便机器人能够从开始到目标跟踪它。 为了展示拟议算法的优势, 我们在一系列模拟实验中将其与常规路径规划算法进行比较。 结果表明, 拟议的算法在时间、 成功率和路径长度方面可以取得更好的业绩 。