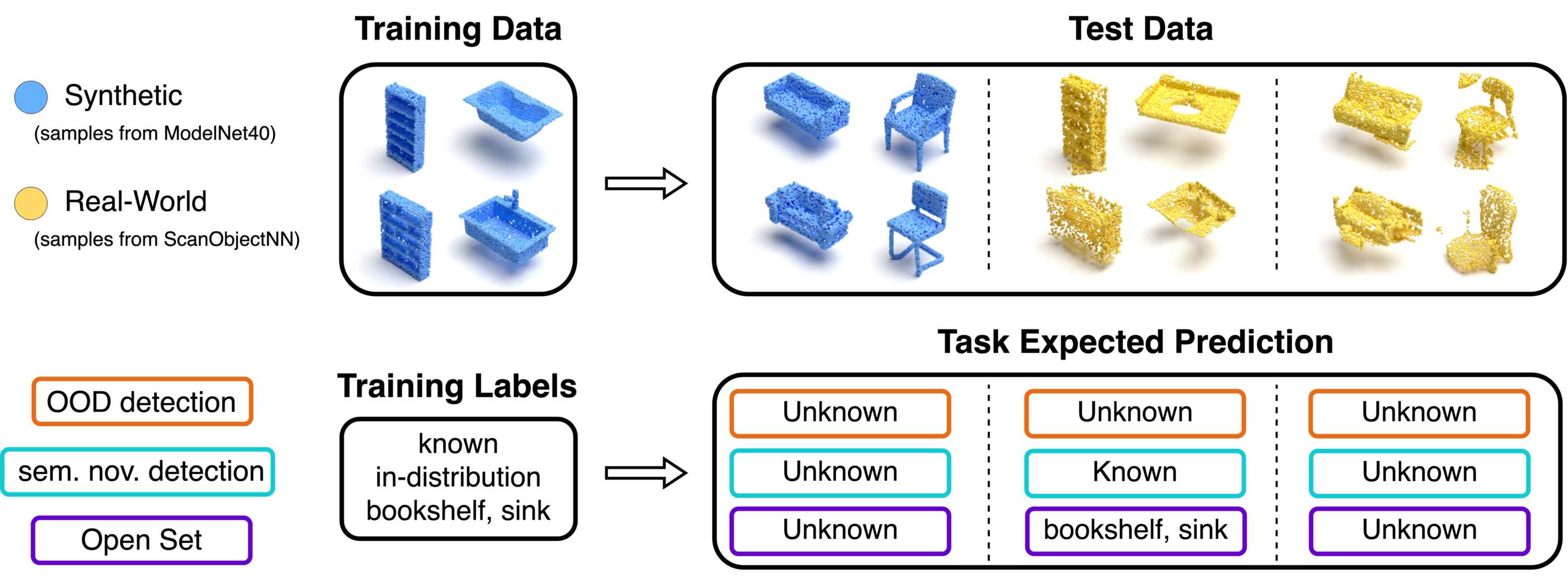
In recent years there has been significant progress in the field of 3D learning on classification, detection and segmentation problems. The vast majority of the existing studies focus on canonical closed-set conditions, neglecting the intrinsic open nature of the real-world. This limits the abilities of robots and autonomous systems involved in safety-critical applications that require managing novel and unknown signals. In this context exploiting 3D data can be a valuable asset since it provides rich information about the geometry of perceived objects and scenes. With this paper we provide the first broad study on 3D Open Set learning. We introduce 3DOS: a novel testbed for semantic novelty detection that considers several settings with increasing difficulties in terms of semantic (category) shift, and covers both in-domain (synthetic-to-synthetic, real-to-real) and cross-domain (synthetic-to-real) scenarios. Moreover, we investigate the related 2D Open Set literature to understand if and how its recent improvements are effective on 3D data. Our extensive benchmark positions several algorithms in the same coherent picture, revealing their strengths and limitations. The results of our analysis may serve as a reliable foothold for future tailored 3D Open Set methods.
翻译:近些年来,在3D分类、检测和分割问题学习领域取得了显著进展。绝大多数现有研究都侧重于卡通封闭型条件,忽视了现实世界的内在开放性质。这限制了机器人和自主系统在安全关键应用中的能力,而安全关键应用需要管理新颖和未知信号。在这方面,利用3D数据可以是一种宝贵的资产,因为它提供了有关被观察对象和场景的几何的丰富信息。用本文件,我们提供了关于3D OpenSet学习的首次广泛研究。我们引入了3DDS:语义新颖检测的新测试台,它考虑到在语义转换(类别)方面日益困难的几种环境,并覆盖了内部(合成合成、真实到现实)和交叉域(合成到现实)两种环境(合成和现实)的能力。此外,我们调查了相关的2D OpenSet文献,以了解其最近的改进是否和如何对3D数据产生效果。我们在同一个连续的图像中的广泛基准位置,揭示了其强弱力和局限性。