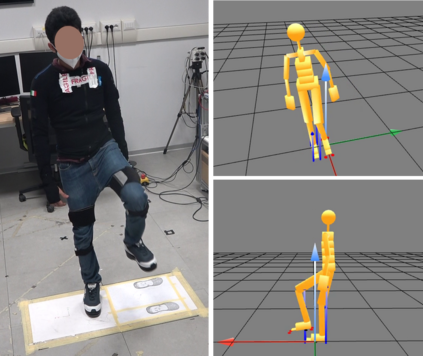
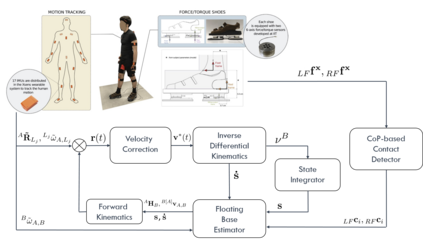
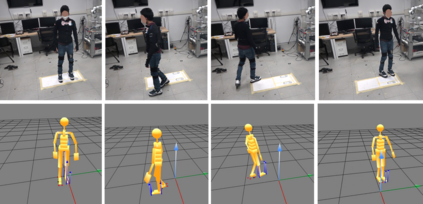
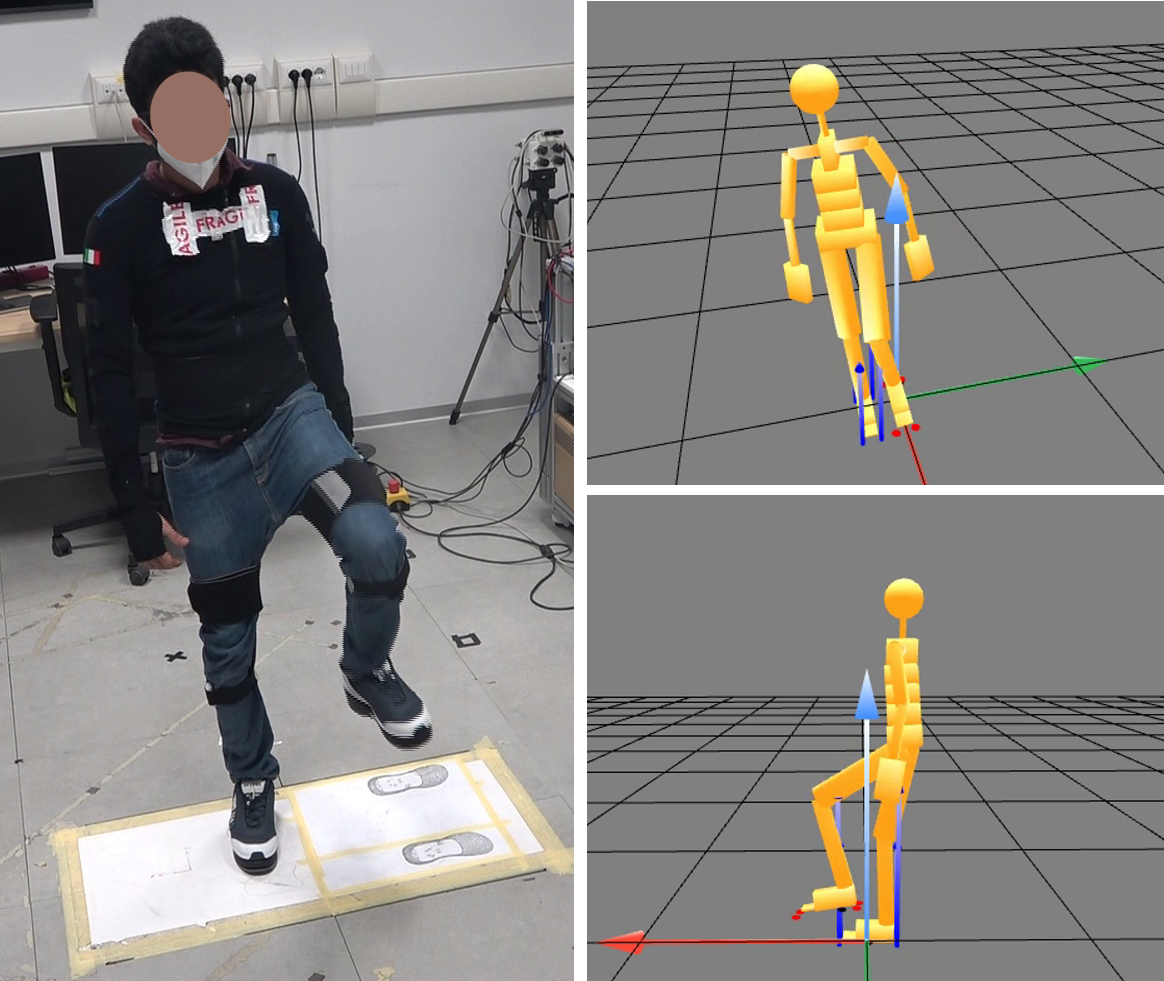
Full-body motion estimation of a human through wearable sensing technologies is challenging in the absence of position sensors. This paper contributes to the development of a model-based whole-body kinematics estimation algorithm using wearable distributed inertial and force-torque sensing. This is done by extending the existing dynamical optimization-based Inverse Kinematics (IK) approach for joint state estimation, in cascade, to include a center of pressure-based contact detector and a contact-aided Kalman filter on Lie groups for floating base pose estimation. The proposed method is tested in an experimental scenario where a human equipped with a sensorized suit and shoes performs walking motions. The proposed method is demonstrated to obtain a reliable reconstruction of the whole-body human motion.
翻译:在没有定位传感器的情况下,通过可磨损的遥感技术对人体进行全体运动估计具有挑战性。本文件有助于利用可磨损分布惯性及强力感测法开发基于模型的整体体运动动力学估计算法。这是通过在级联中扩大现有的动态优化反向营养学(IK)联合国家估计方法,以包括一个基于压力的接触探测器中心和一个用于浮动基数的Lie小组接触辅助的Kalman过滤器。在实验情景中测试了拟议方法,在实验情景中,配备了感知式防护服和鞋子的人进行行走运动。所提议方法的证明是为了实现整个身体运动的可靠重建。