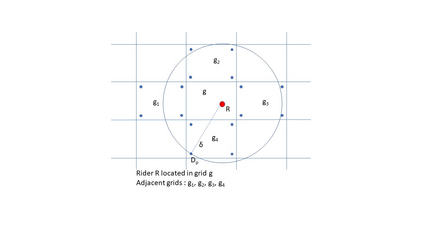
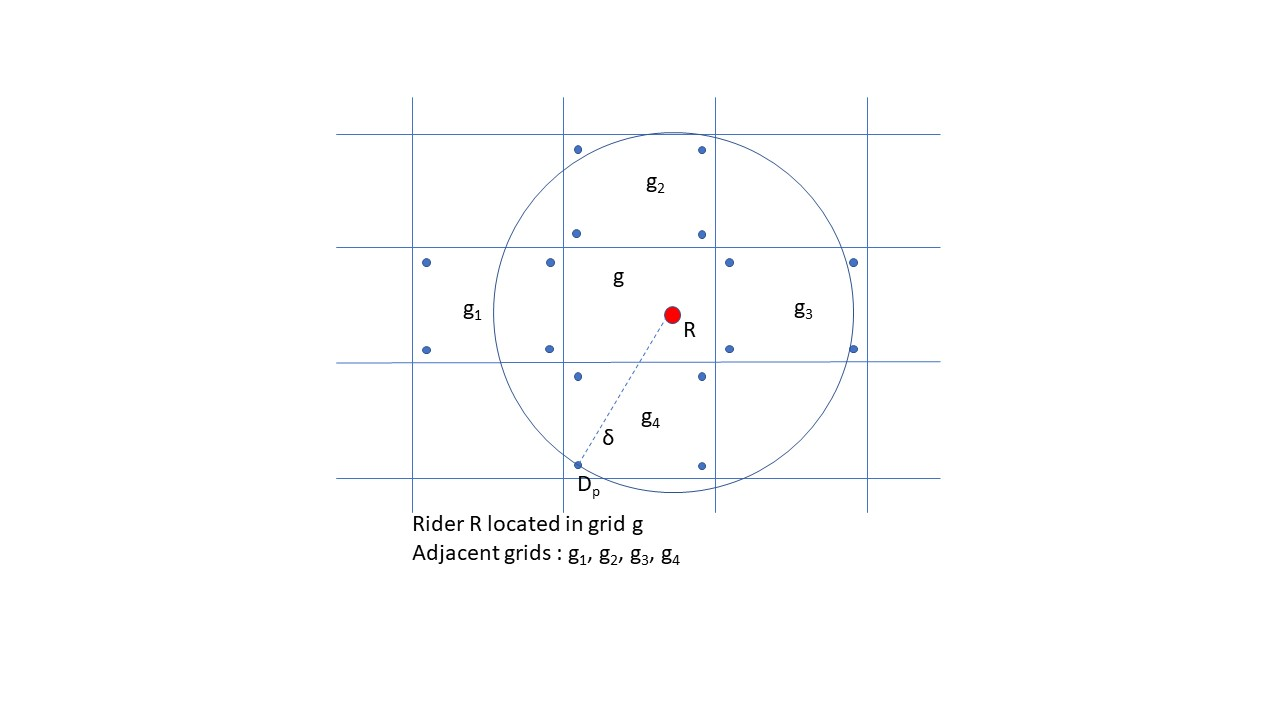
Privacy preservation in Ride-Hailing Services (RHS) is intended to protect privacy of drivers and riders. pRide, published in IEEE Trans. Vehicular Technology 2021, is a prediction based privacy-preserving RHS protocol to match riders with an optimum driver. In the protocol, the Service Provider (SP) homomorphically computes Euclidean distances between encrypted locations of drivers and rider. Rider selects an optimum driver using decrypted distances augmented by a new-ride-emergence prediction. To improve the effectiveness of driver selection, the paper proposes an enhanced version where each driver gives encrypted distances to each corner of her grid. To thwart a rider from using these distances to launch an inference attack, the SP blinds these distances before sharing them with the rider. In this work, we propose a passive attack where an honest-but-curious adversary rider who makes a single ride request and receives the blinded distances from SP can recover the constants used to blind the distances. Using the unblinded distances, rider to driver distance and Google Nearest Road API, the adversary can obtain the precise locations of responding drivers. We conduct experiments with random on-road driver locations for four different cities. Our experiments show that we can determine the precise locations of at least 80% of the drivers participating in the enhanced pRide protocol.
翻译:Riide-Hailing Services (RHS) 的隐私保护(RHS) 旨在保护驾驶员和骑手的隐私。 在IEEEE Trans上出版的PRide 。 2021 车辆技术是一个基于预测的隐私保护RHS协议,旨在将驾驶员与最佳驾驶员匹配。 在协议中, 服务提供商(SP) 以同质的方式计算驾驶员和骑手加密地点之间的Euclide距离。 Rider 使用经新式模拟预测增强的解密距离选择了最佳驾驶员。 为了提高司机选择的有效性, 本文提议了一个强化版本, 每位驾驶员向她网的每个角落提供加密距离。 要阻止骑手使用这些距离来发动推论攻击, SP 将这些距离盲目的距离与最佳驾驶员相隔开。 在这项工作中, 我们提议进行被动攻击, 一位诚实但又精准的骑手能够从SP 接收盲距离的常数 。 使用不透视距离的距离, 使用无线距离, 司机的距离, 驾驶员到谷内最短距离, 谷内最小的距离和谷内谷内最短路段距离, 我们的驾驶员在80 目的地的驾驶员可以进行随机的实验, 我们的80次的驾驶员在参与的80次的路径的目的地的目的地可以选择。