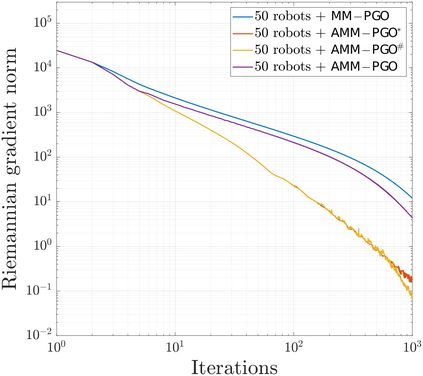
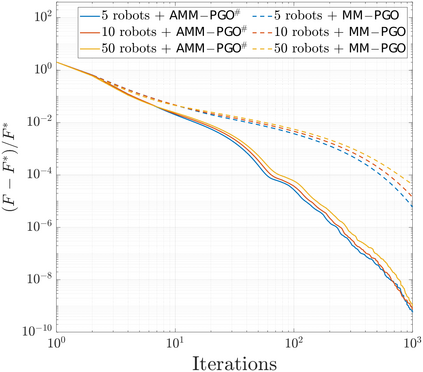
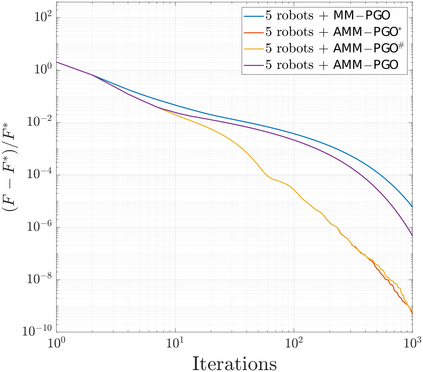
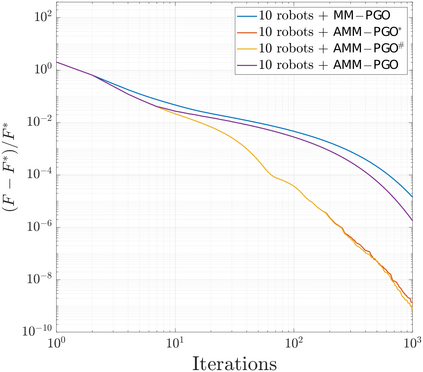
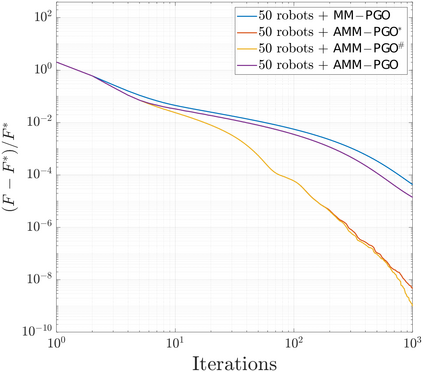
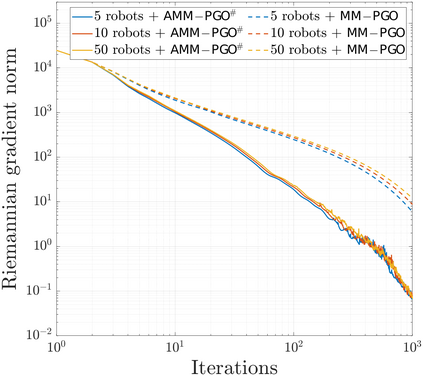
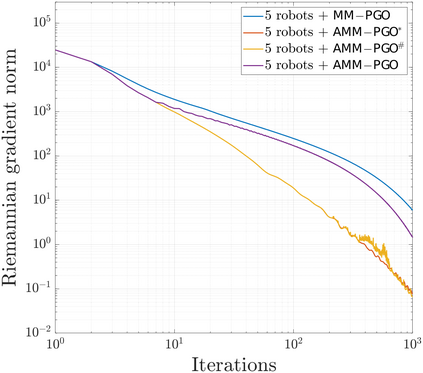
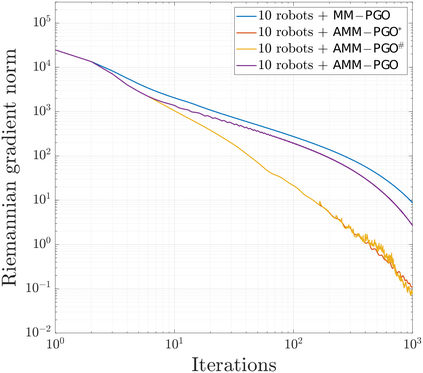
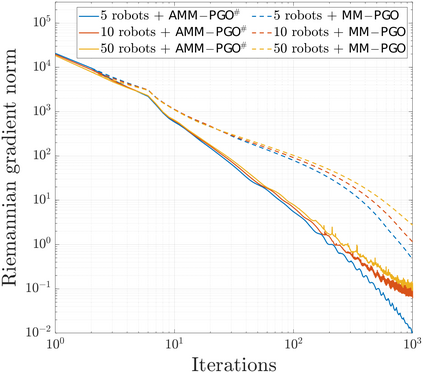
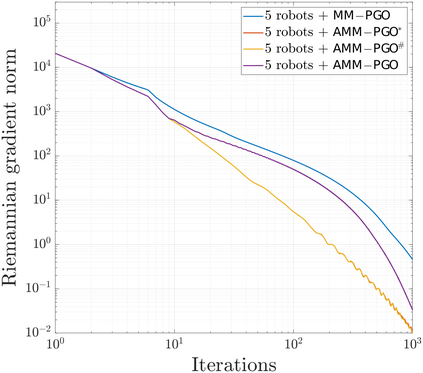
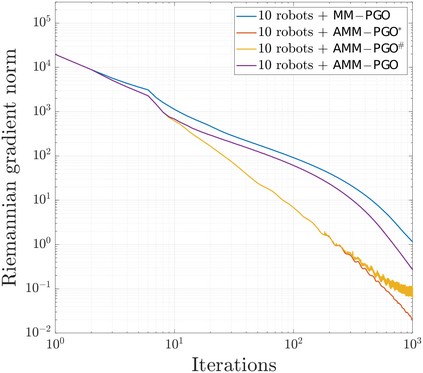
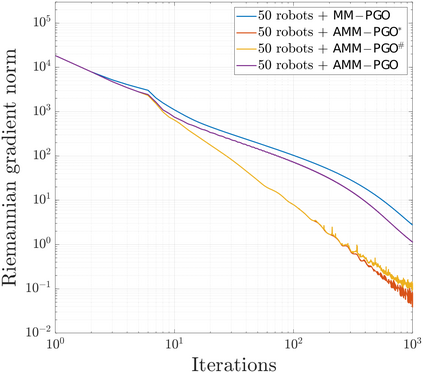
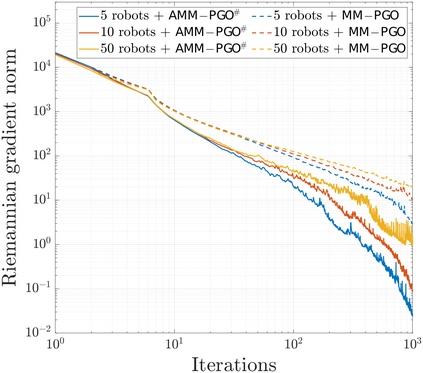
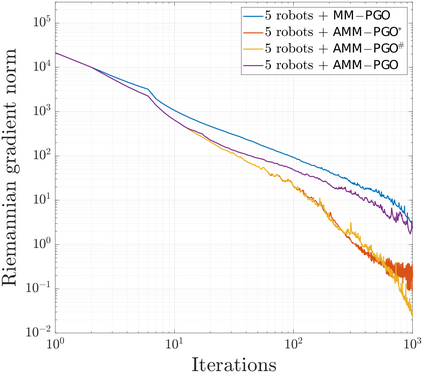
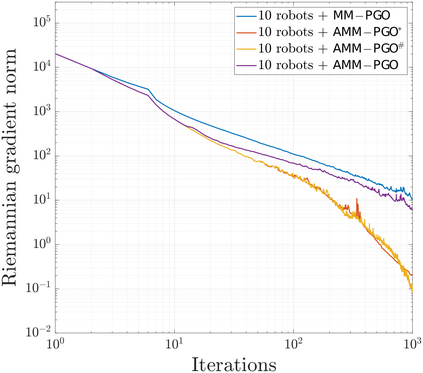
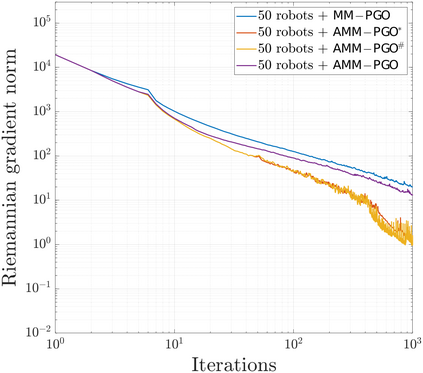
We consider the problem of distributed pose graph optimization (PGO) that has important applications in multi-robot simultaneous localization and mapping (SLAM). We propose the majorization minimization (MM) method for distributed PGO ($\mathsf{MM\!\!-\!\!PGO}$) that applies to a broad class of robust loss kernels. The $\mathsf{MM\!\!-\!\!PGO}$ method is guaranteed to converge to first-order critical points under mild conditions. Furthermore, noting that the $\mathsf{MM\!\!-\!\!PGO}$ method is reminiscent of proximal methods, we leverage Nesterov's method and adopt adaptive restarts to accelerate convergence. The resulting accelerated MM methods for distributed PGO -- both with a master node in the network ($\mathsf{AMM\!\!-\!\!PGO}^*$) and without ($\mathsf{AMM\!\!-\!\!PGO}^{#}$) -- have faster convergence in contrast to the $\mathsf{MM\!\!-\!\!PGO}$ method without sacrificing theoretical guarantees. In particular, the $\mathsf{AMM\!\!-\!\!PGO}^{#}$ method, which needs no master node and is fully decentralized, features a novel adaptive restart scheme and has a rate of convergence comparable to that of the $\mathsf{AMM\!\!-\!\!PGO}^*$ method using a master node to aggregate information from all the other nodes. The efficacy of this work is validated through extensive applications to 2D and 3D SLAM benchmark datasets and comprehensive comparisons against existing state-of-the-art methods, indicating that our MM methods converge faster and result in better solutions to distributed PGO.
翻译:我们考虑分布式图像优化( PGO) 的问题, 该方法在多机器人同步本地化和映射( SLAM) 中具有重要应用 。 此外, 我们建议对分布式 PGO ($mathsf{MM\!\!\\!\!\!\!!PGO} ) 应用主要最小化方法( MMM), 该方法适用于一系列强大的损失内核。 $\ mathsf{ mm@\!\!\!\!\! pGO} 方法保证在轻度条件下, 聚集到第一阶的关键点 。 此外, 我们注意到 $maths=D!\\\\\\\\\\\\\\\! PGGO} 方法令人回味化 方法( NMFO_\\\\ mal_ group) 将快速化方法( ) 用于快速化数据。 快速化方法( ) 以网络中的主节点( $mafs\\\\\!\!\!\!\!\!\ mMFMDMDlicks) 数据 正在使用一个对比方法, 该方法, 方法, 该方法将使用特定数据方法, 该方法, 该方法将数据向当前数据流法。