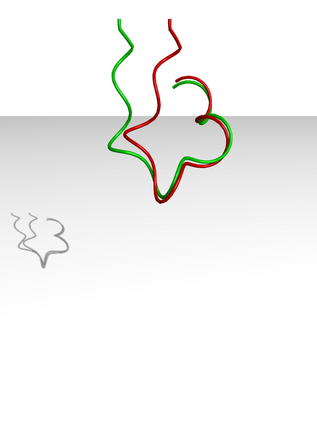
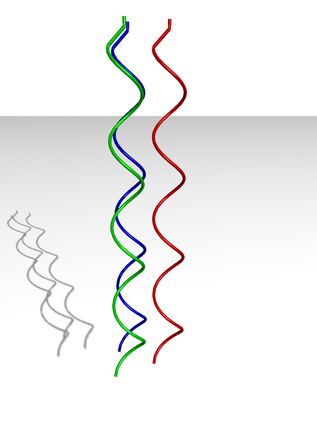
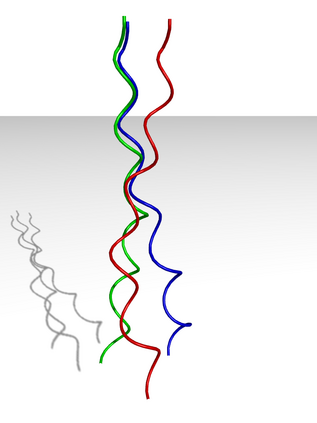
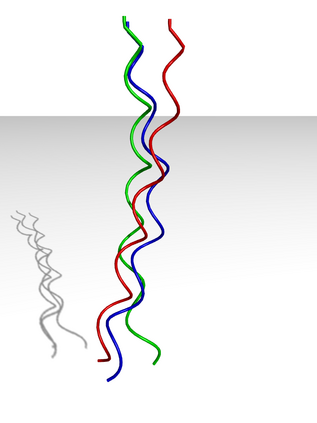
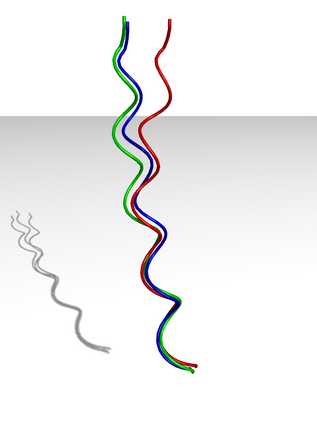
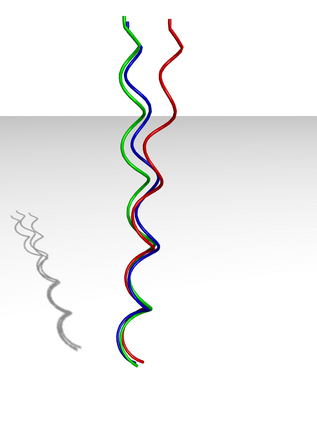
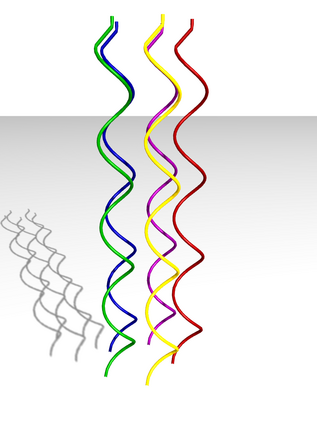
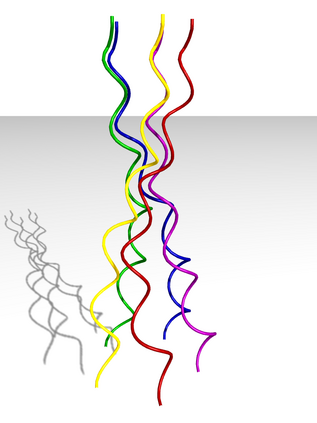
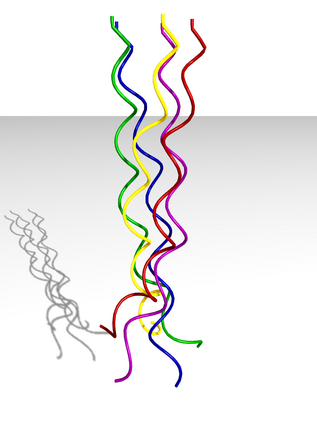
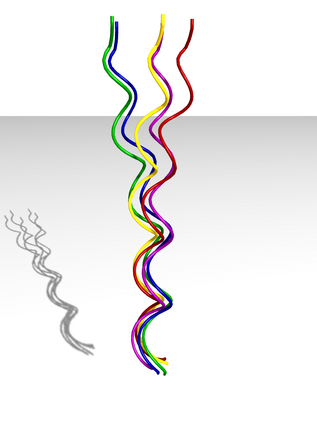
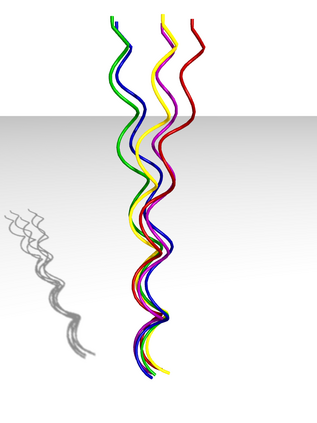
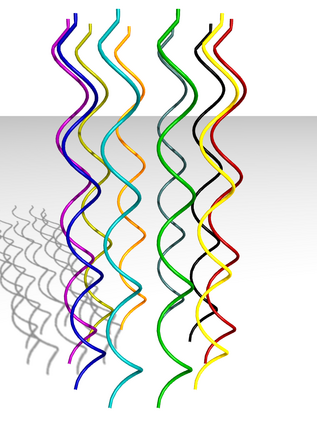
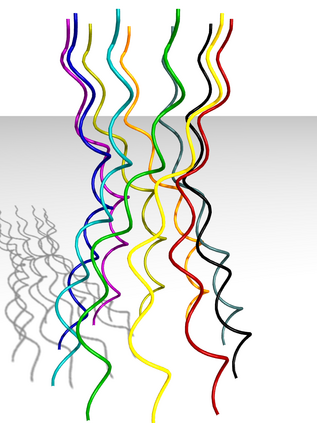
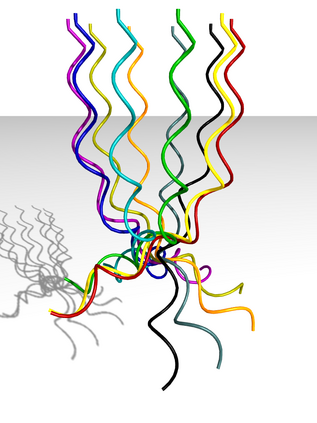
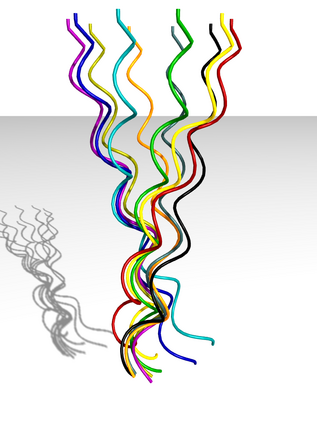
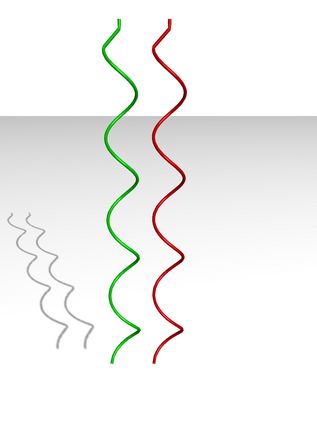
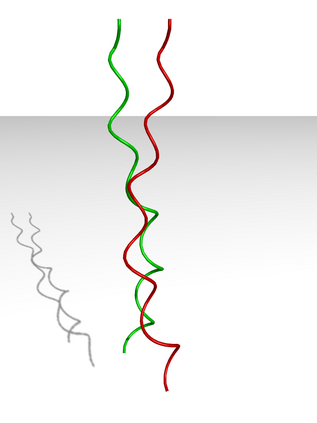
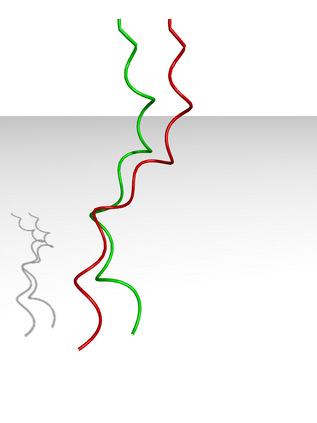
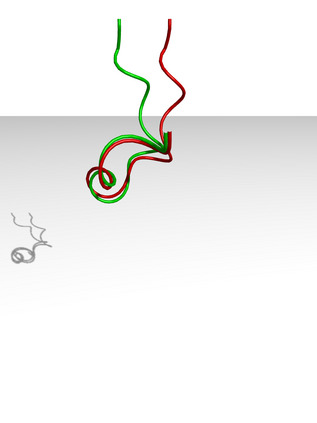
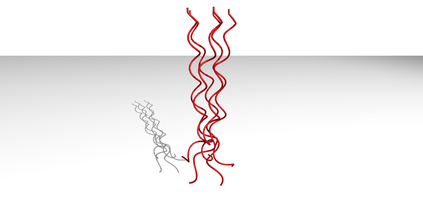
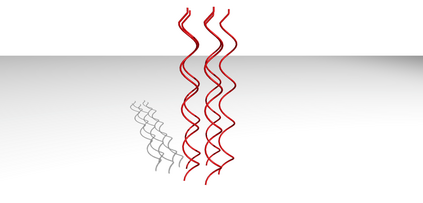
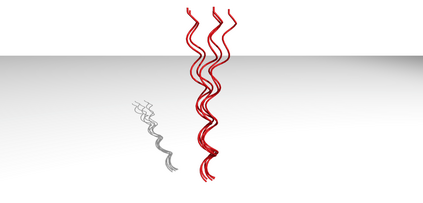
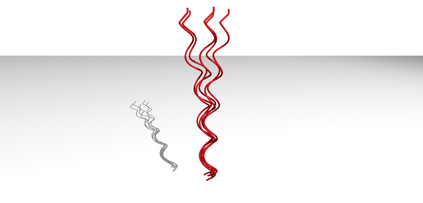
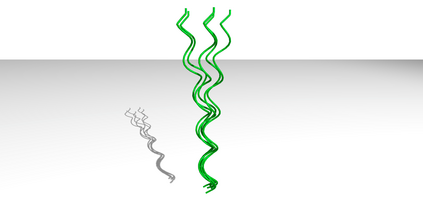
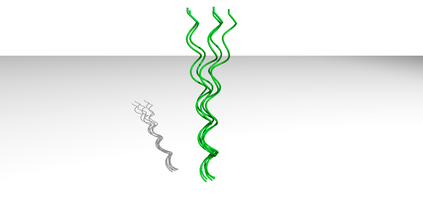
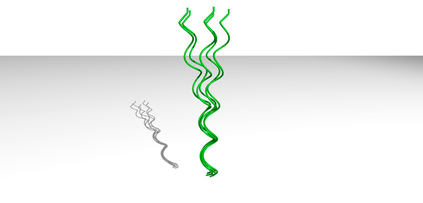
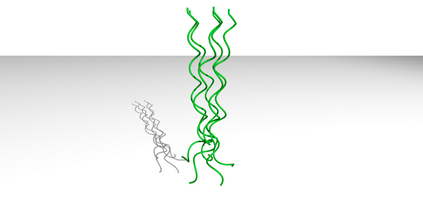
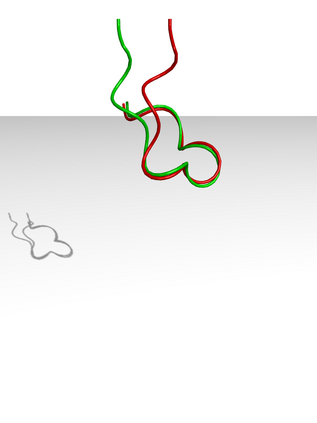
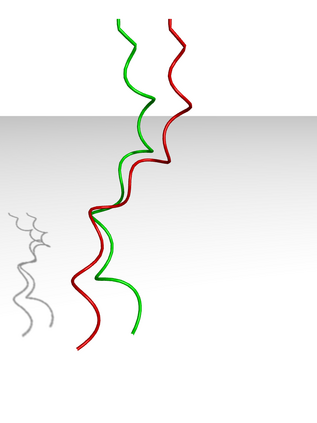
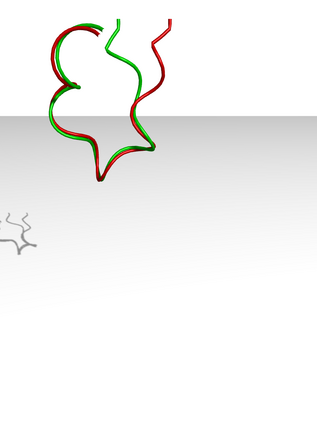
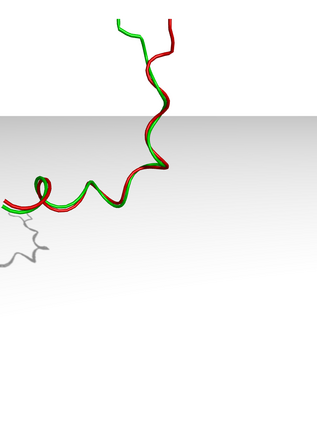
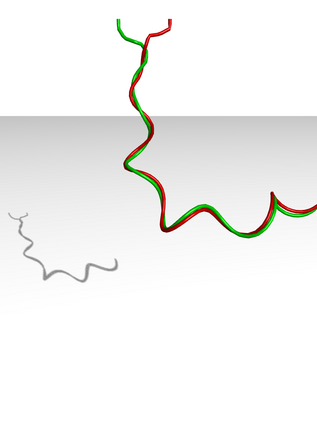
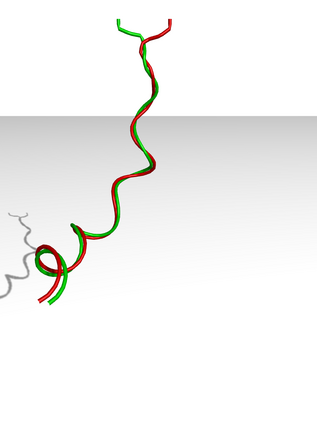
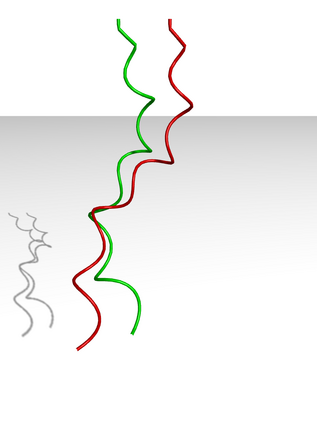
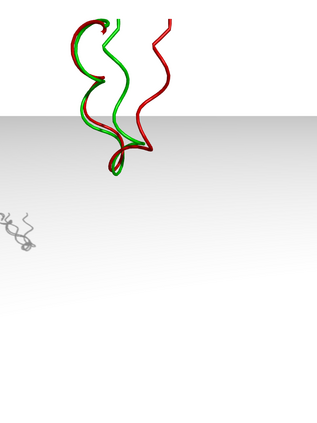
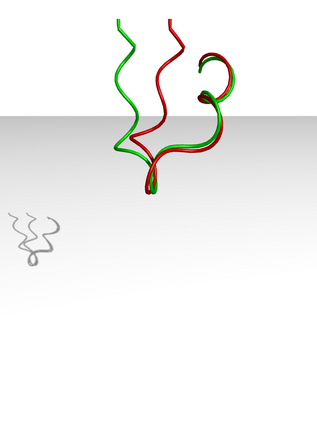
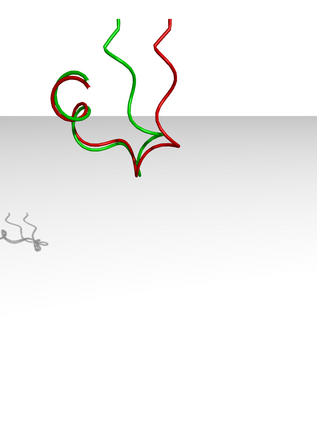
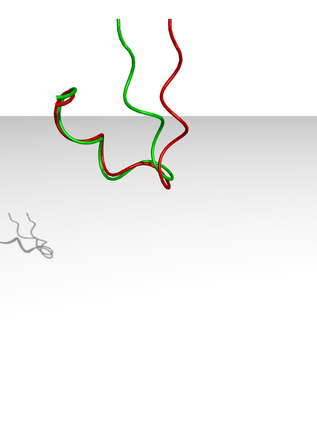
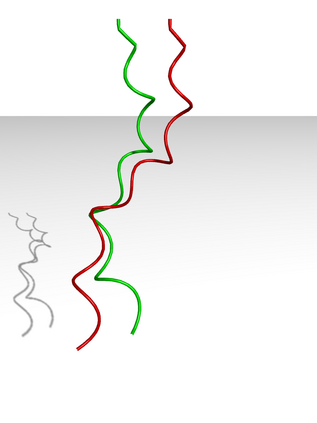
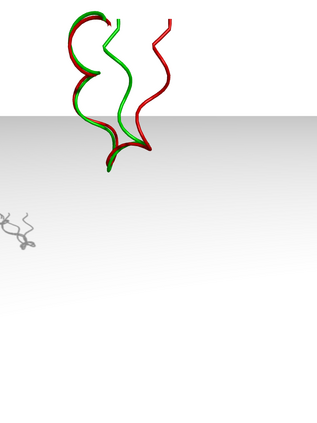
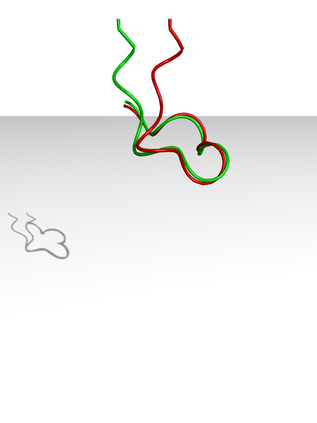
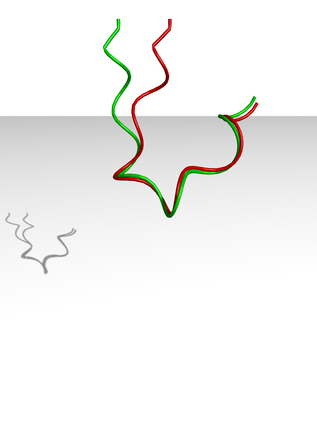
Accurate frictional contact is critical in simulating the assembly of rod-like structures in the practical world, such as knots, hairs, flagella, and more. Due to their high geometric nonlinearity and elasticity, rod-on-rod contact remains a challenging problem tackled by researchers in both computational mechanics and computer graphics. Typically, frictional contact is regarded as constraints for the equations of motions of a system. Such constraints are often computed independently at every time step in a dynamic simulation, thus slowing down the simulation and possibly introducing numerical convergence issues. This paper proposes a fully implicit penalty-based frictional contact method, Implicit Contact Model (IMC), that efficiently and robustly captures accurate frictional contact responses. We showcase our algorithm's performance for the challenging and novel contact scenario of flagella bundling in fluid medium, a significant phenomenon in biology that motivates novel engineering applications in soft robotics. In addition to this, we offer a side-by-side comparison with Incremental Potential Contact (IPC), a state-of-the-art contact handling algorithm. We show that IMC possesses comparable accuracy to IPC while converging at a faster rate for the flagella bundling case.
翻译:精确的摩擦接触对于模拟实际世界中像棒状结构的组装至关重要,例如结节、毛发、旗纹等。由于其高几何非线性和弹性,极速接触仍然是研究人员在计算机和计算机图形中处理的一个具有挑战性的问题。一般而言,摩擦接触被视为一个系统动作方程式的制约因素。这种限制经常在动态模拟的每个步骤中独立计算,从而减缓模拟,并可能引入数字趋同问题。本文建议一种完全隐含的惩罚性摩擦接触方法,即隐性接触模型(IMC),高效和有力地捕捉到准确的摩擦接触反应。我们展示我们的算法在具有挑战性和新颖的接触情景上的表现,即国旗在流体介质中捆绑,这是生物学中的一种重要现象,激发了软机器人的新型工程应用。此外,我们提供了一种与递增潜力接触(IPC)的平行比较,即一种状态接触处理算法。我们展示了IMC具有可比较的精确性,同时将旗杆绑在更快的速度上。