
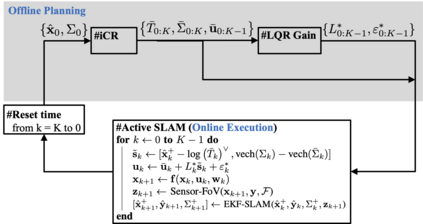
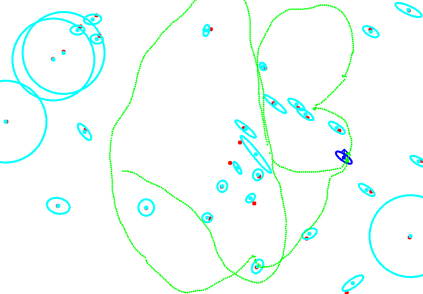
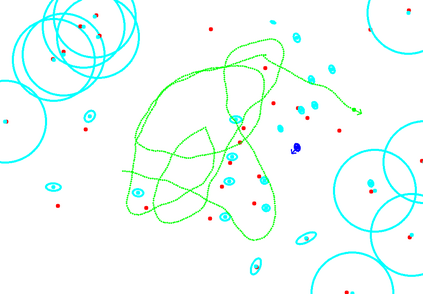
This paper proposes a novel active Simultaneous Localization and Mapping (SLAM) method with continuous trajectory optimization over a stochastic robot dynamics model. The problem is formalized as a stochastic optimal control over the continuous robot kinematic model to minimize a cost function that involves the covariance matrix of the landmark states. We tackle the problem by separately obtaining an open-loop control sequence subject to deterministic dynamics by iterative Covariance Regulation (iCR) and a closed-loop feedback control under stochastic robot and covariance dynamics by Linear Quadratic Regulator (LQR). The proposed optimization method captures the coupling between localization and mapping in predicting uncertainty evolution and synthesizes highly informative sensing trajectories. We demonstrate its performance in active landmark-based SLAM using relative-position measurements with a limited field of view.
翻译:本文提出了一种新型的动态同步本地化和绘图(SLAM)方法,在随机机器人动态模型上不断优化轨迹。这个问题被正式确定为对连续机器人运动模型的一种随机最佳控制,以尽量减少涉及里程碑状态共变矩阵的成本功能。我们通过通过迭代共变监管(iCR)和由线性夸德里亚管理公司(LQR)在随机机器人和常变动态控制下进行闭路反馈控制,分别获得受确定性动态影响的开放环流控制序列来解决这个问题。 拟议的优化方法在预测不确定性演变和合成高信息化感测轨迹时,捕捉到本地化和绘图之间的结合。我们用有限视野的相对定位测量来显示其在积极的基于地标的 SLM 中的表现。
相关内容

Source: Apple - iOS 8



