
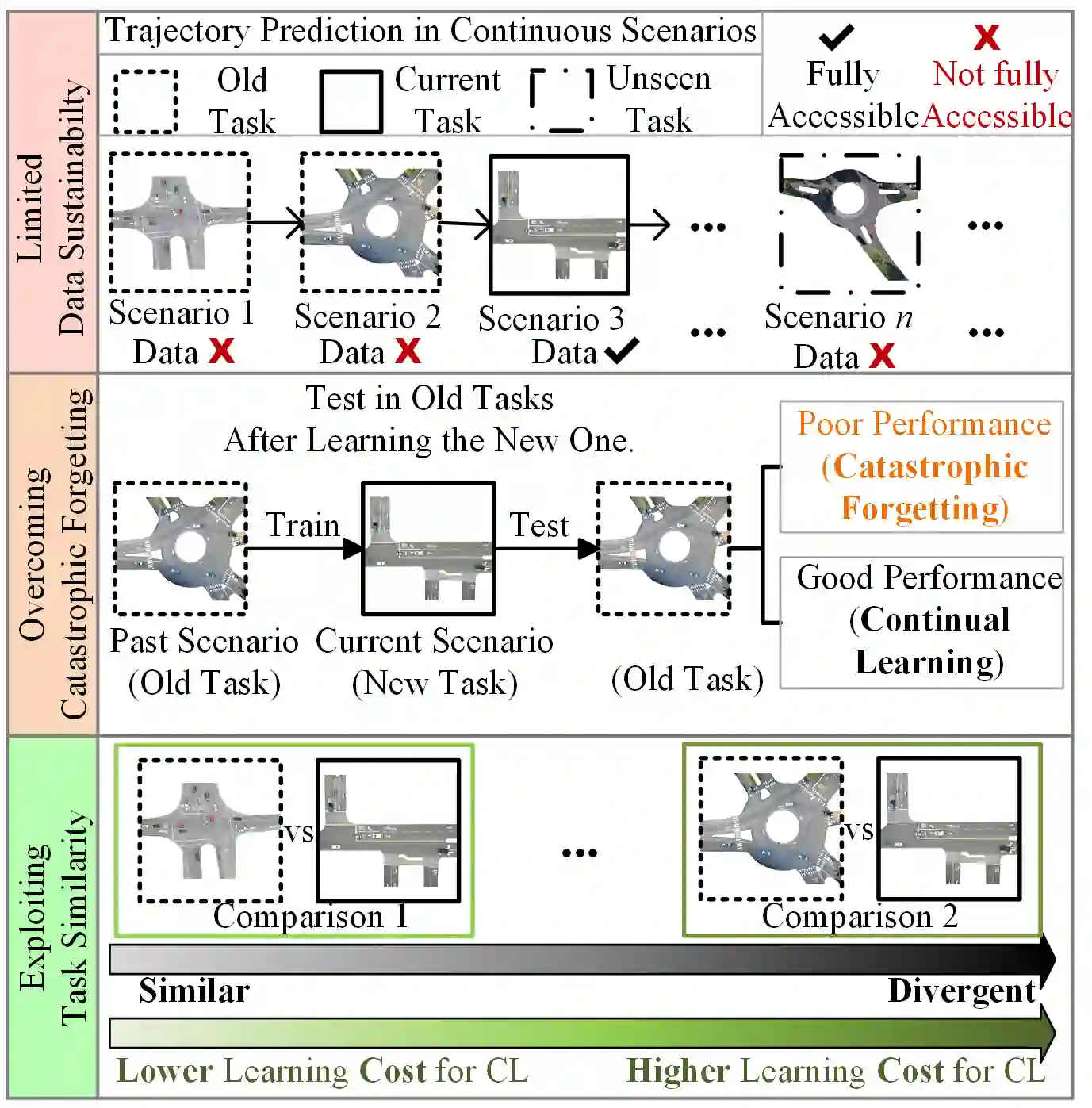
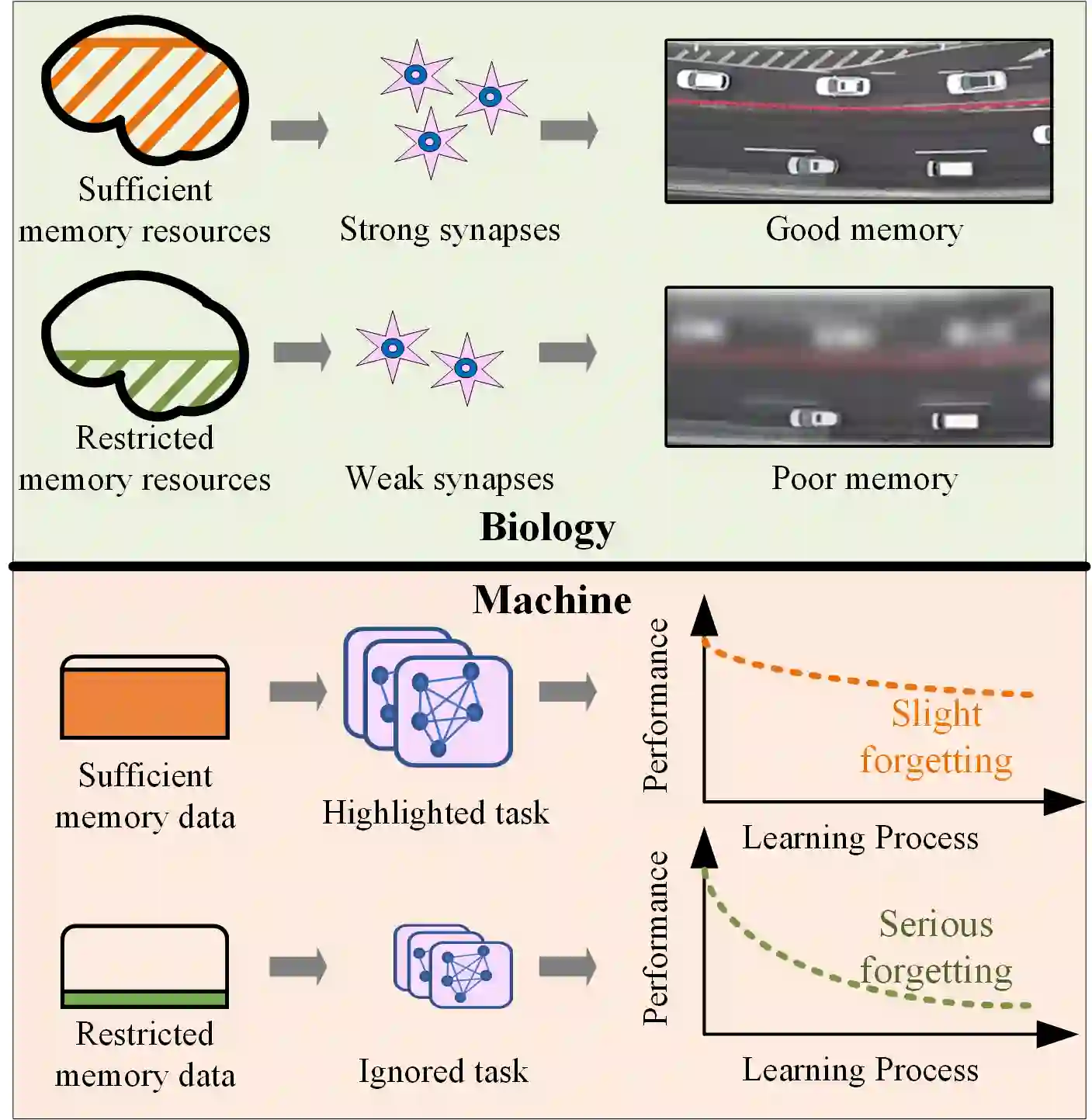
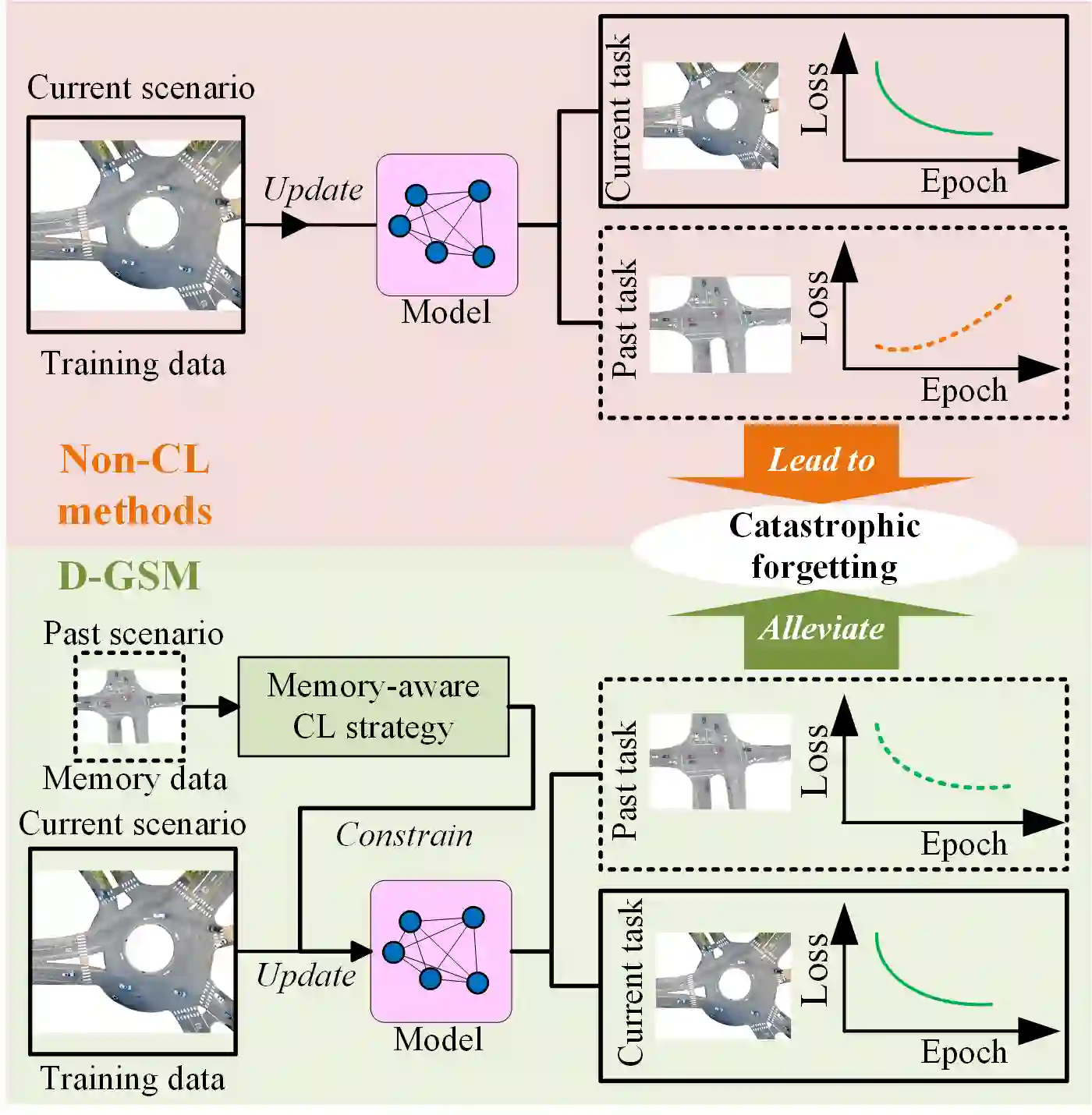
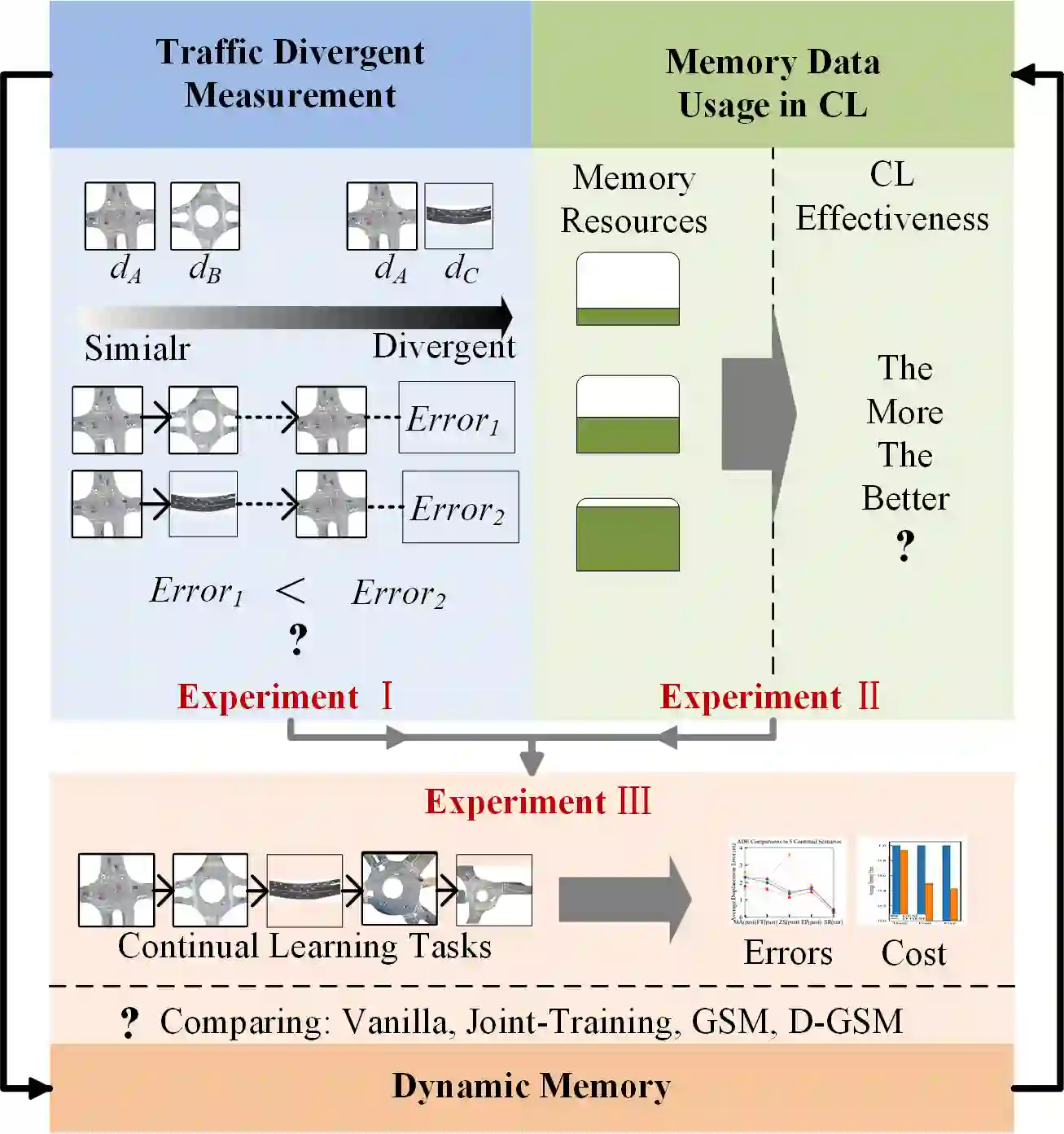
Developing autonomous vehicles (AVs) helps improve the road safety and traffic efficiency of intelligent transportation systems (ITS). Accurately predicting the trajectories of traffic participants is essential to the decision-making and motion planning of AVs in interactive scenarios. Recently, learning-based trajectory predictors have shown state-of-the-art performance in highway or urban areas. However, most existing learning-based models trained with fixed datasets may perform poorly in continuously changing scenarios. Specifically, they may not perform well in learned scenarios after learning the new one. This phenomenon is called "catastrophic forgetting". Few studies investigate trajectory predictions in continuous scenarios, where catastrophic forgetting may happen. To handle this problem, first, a novel continual learning (CL) approach for vehicle trajectory prediction is proposed in this paper. Then, inspired by brain science, a dynamic memory mechanism is developed by utilizing the measurement of traffic divergence between scenarios, which balances the performance and training efficiency of the proposed CL approach. Finally, datasets collected from different locations are used to design continual training and testing methods in experiments. Experimental results show that the proposed approach achieves consistently high prediction accuracy in continuous scenarios without re-training, which mitigates catastrophic forgetting compared to non-CL approaches. The implementation of the proposed approach is publicly available at https://github.com/BIT-Jack/D-GSM
翻译:发展自主车辆有助于提高智能运输系统的道路安全和交通效率。准确预测交通参与者的轨迹对于交互式情景中AV的决策和动作规划至关重要。最近,基于学习的轨迹预测器展示了高速公路或城市地区最先进的性能。然而,大多数经过固定数据集培训的现有学习模式在不断变化的情景中可能表现不佳。具体地说,在学习新的情景后,它们可能无法很好地在学习到的新情景中发挥作用。这种现象被称为“灾难性的遗忘”。很少有研究对连续情景中的轨迹预测进行调查,而灾难性的遗忘可能发生。首先,本文提出了关于车辆轨迹预测的新的持续学习(CL)方法。随后,在脑科学的启发下,通过对各种情景之间的交通差异进行衡量,平衡拟议的CL方法的绩效和培训效率,形成了动态的记忆机制。最后,从不同地点收集的数据集被用于设计持续的实验培训和测试方法。实验结果表明,拟议的“Jack-D-D”方法在连续的情景中实现了持续的高准确性预测,而在不进行再培训的情况下,在不断的情景中将MLA/Regisregis/Revial 。

相关内容

Source: Apple - iOS 8

