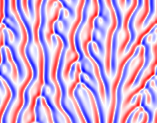
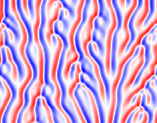
Models used for many important engineering and natural systems are imperfect. The discrepancy between the mathematical representations of a true physical system and its imperfect model is called the model error. These model errors can lead to substantial difference between the numerical solutions of the model and the observations of the system, particularly in those involving nonlinear, multi-scale phenomena. Thus, there is substantial interest in reducing model errors, particularly through understanding their physics and sources and leveraging the rapid growth of observational data. Here we introduce a framework named MEDIDA: Model Error Discovery with Interpretability and Data Assimilation. MEDIDA only requires a working numerical solver of the model and a small number of noise-free or noisy sporadic observations of the system. In MEDIDA, first the model error is estimated from differences between the observed states and model-predicted states (the latter are obtained from a number of one-time-step numerical integrations from the previous observed states). If observations are noisy, a data assimilation (DA) technique such as ensemble Kalman filter (EnKF) is first used to provide a noise-free analysis state of the system, which is then used in estimating the model error. Finally, an equation-discovery technique, such as the relevance vector machine (RVM), a sparsity-promoting Bayesian method, is used to identify an interpretable, parsimonious, closed-form representation of the model error. Using the chaotic Kuramoto-Sivashinsky (KS) system as the test case, we demonstrate the excellent performance of MEDIDA in discovering different types of structural/parametric model errors, representing different types of missing physics, using noise-free and noisy observations.
翻译:用于许多重要工程和自然系统的模型是不完善的。 真正的物理系统及其不完善模型的数学表达形式与不完善模型之间的差异被称为模型错误。 这些模型错误可能导致模型数字解决方案与系统观测之间的巨大差异, 特别是涉及非线性、 多尺度现象的数值解决方案与系统观测之间的巨大差异。 因此, 人们非常希望减少模型错误, 特别是通过了解其物理和来源以及利用观测数据的快速增长来减少模型错误。 我们在这里引入了一个名为 MEDIDA 的框架: 模型错误发现, 包括解释性能和数据精度的精确度。 MEDIDA 只需要一个模型的工作数字解析器, 并且对系统进行少量无噪音或噪音的零星观测。 在MEDIDA 中, 模型错误首先根据所观察到的州和模型预测国之间的差异来估计模型错误( 模型从数个一次性的数字整合了数字整合结果) 。 如果观测是噪音, 数据自由化技术, 比如, 计算性能/ 和数据精确度过滤器 (EnkF), 只需要对模型进行一个无噪音分析, 系统进行不动的数值分析, 结构性观测, 然后用一个模型解释法,,, 用于 机性 机性 的 机性 机性, 的 系统 的 的 的 的 机性 机性 机性 机性 机性 机性, 机性 机性 的 的, 的 的 的 的 机性 的 的 的 的 的 的, 的 的 的 的 的 的 的 的 的 的 的 的 的 的 的 的 的 的 的 的 的 的 的 的 的 的 的 的 的 的 的 的 的 的 的 的 的 的 的 的 的 的 的 的 的 的 的 的 的 的 的 的 的 的 的 的 的 的 的 的 的 的 的 的 的 的 的 的 的 的 的 的 的 的 的 的 的