
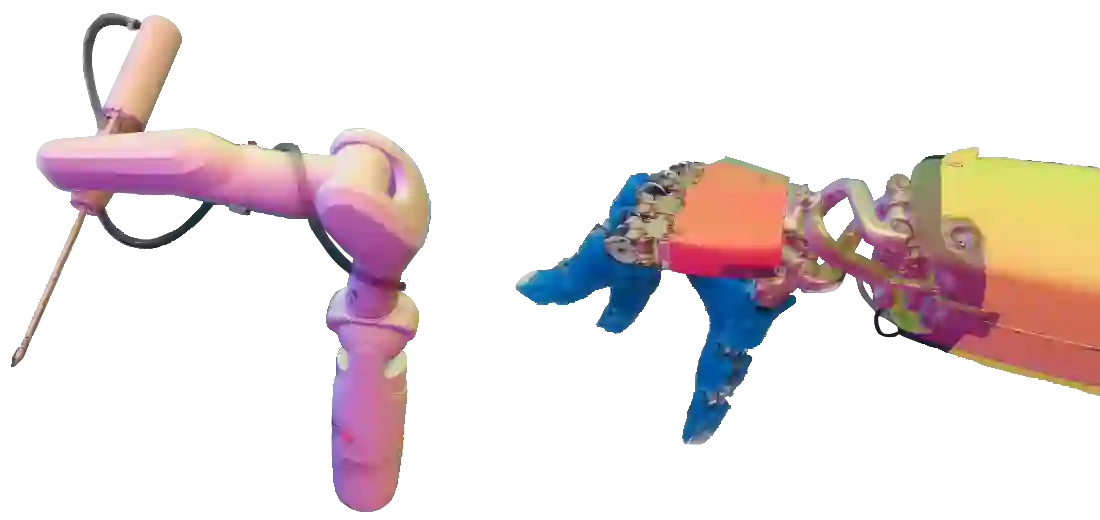
Kinematic structures are very common in the real world. They range from simple articulated objects to complex mechanical systems. However, despite their relevance, most model-based 3D tracking methods only consider rigid objects. To overcome this limitation, we propose a flexible framework that allows the extension of existing 6DoF algorithms to kinematic structures. Our approach focuses on methods that employ Newton-like optimization techniques, which are widely used in object tracking. The framework considers both tree-like and closed kinematic structures and allows a flexible configuration of joints and constraints. To project equations from individual rigid bodies to a multi-body system, Jacobians are used. For closed kinematic chains, a novel formulation that features Lagrange multipliers is developed. In a detailed mathematical proof, we show that our constraint formulation leads to an exact kinematic solution and converges in a single iteration. Based on the proposed framework, we extend ICG, which is a state-of-the-art rigid object tracking algorithm, to multi-body tracking. For the evaluation, we create a highly-realistic synthetic dataset that features a large number of sequences and various robots. Based on this dataset, we conduct a wide variety of experiments that demonstrate the excellent performance of the developed framework and our multi-body tracker.
翻译:物理结构在现实世界中非常常见。 它们从简单的分解对象到复杂的机械系统。 但是, 尽管它们的相关性, 大多数基于模型的三维跟踪方法都只考虑僵硬的物体。 为了克服这一限制, 我们提议了一个灵活的框架, 允许将现有的 6DoF 算法扩展至运动结构。 我们的方法侧重于使用像牛顿那样的优化技术的方法, 广泛用于物体跟踪。 框架既考虑树类和封闭的运动结构, 也考虑灵活地配置接合和制约。 对于从单个的僵硬体到多体系统的方程式, 使用雅各布人。 对于封闭的运动链, 一种具有拉格朗乘数特征的新式配方。 在详细的数学证据中, 我们显示我们的制约配方能够导致一个精确的运动解决方案, 并集中在一个单一的循环中。 根据拟议的框架, 我们将导航卫星委员会推广到多体跟踪。 对于评估来说, 我们创造了一个高度现实的合成数据集, 包含大量的序列和各种机器人的模型。
相关内容

- Today (iOS and OS X): widgets for the Today view of Notification Center
- Share (iOS and OS X): post content to web services or share content with others
- Actions (iOS and OS X): app extensions to view or manipulate inside another app
- Photo Editing (iOS): edit a photo or video in Apple's Photos app with extensions from a third-party apps
- Finder Sync (OS X): remote file storage in the Finder with support for Finder content annotation
- Storage Provider (iOS): an interface between files inside an app and other apps on a user's device
- Custom Keyboard (iOS): system-wide alternative keyboards
Source: iOS 8 Extensions: Apple’s Plan for a Powerful App Ecosystem


