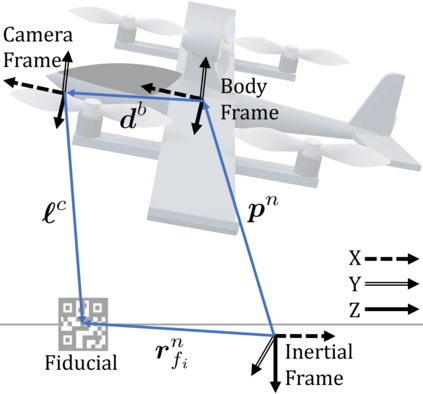
The possible applications and benefits of autonomous Unmanned Aerial Vehicle (UAV) use in urban areas are gaining considerable attention. Before these possibilities can be realized, it is essential that UAVs be able to navigate reliably and precisely in urban environments. The most common means of determining the location of a UAV is to utilize position measurements from Global Navigation Satellite Systems (GNSS). In urban environments, however, GNSS measurements are significantly degraded due to occlusions and multipath. This research analyzes the use of camera Line-of-Sight (LOS) measurements to self-describing fiducials as a replacement for conventional GNSS measurements. An extended Kalman filter (EKF) is developed and validated for the purpose of combining continuous measurements from an Inertial Measurement Unit (IMU) with the discrete LOS measurements to accurately estimate the states of a UAV. The sensitivity of the estimation error covariance to various system parameters is assessed, including IMU grade, fiducial placement, vehicle altitude, and image processing frequency.
翻译:无人驾驶飞行器(无人驾驶飞行器)在城市地区的可能应用和益处正在受到相当重视,在实现这些可能性之前,无人驾驶飞行器必须能够可靠和准确地在城市环境中航行,确定无人驾驶飞行器位置的最常用手段是利用全球导航卫星系统(导航卫星系统)的定位测量结果,但在城市环境中,由于隔离性和多途径性,全球导航卫星系统测量结果显著退化,这项研究分析了将摄影机“视线”测量结果用于自制教育设备以替代常规的全球导航卫星系统测量结果的情况,开发并验证了扩大的卡尔曼过滤器,目的是将惰性测量股的连续测量结果与离散的海洋测量结果结合起来,以准确估计无人驾驶飞行器的状况。评估了估计误差对各种系统参数的敏感性,包括IMU等级、易感定位、车辆高度和图像处理频率。