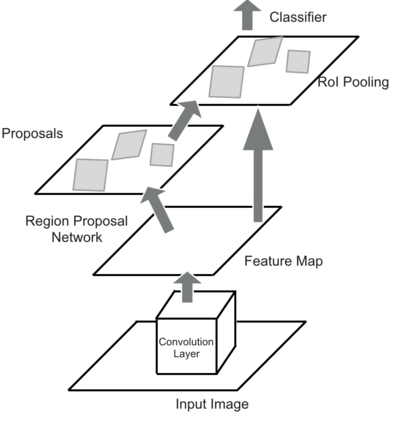
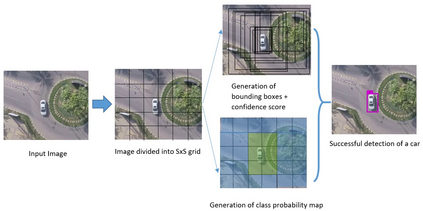
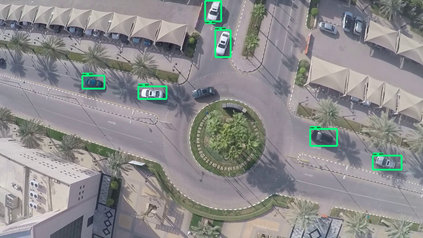
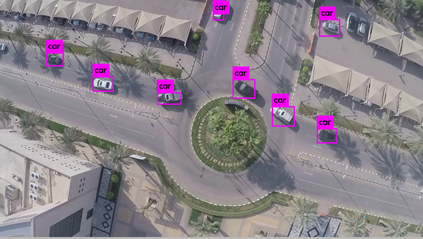
Unmanned Aerial Vehicles are increasingly being used in surveillance and traffic monitoring thanks to their high mobility and ability to cover areas at different altitudes and locations. One of the major challenges is to use aerial images to accurately detect cars and count them in real-time for traffic monitoring purposes. Several deep learning techniques were recently proposed based on convolution neural network (CNN) for real-time classification and recognition in computer vision. However, their performance depends on the scenarios where they are used. In this paper, we investigate the performance of two state-of-the-art CNN algorithms, namely Faster R-CNN and YOLOv3, in the context of car detection from aerial images. We trained and tested these two models on a large car dataset taken from UAVs. We demonstrated in this paper that YOLOv3 outperforms Faster R-CNN in sensitivity and processing time, although they are comparable in the precision metric.
翻译:无人驾驶航空飞行器由于高度机动性高,而且能够覆盖不同高度和地点的地区,因此越来越多地被用于监测和交通监测,其中一项主要挑战是如何利用航空图像准确探测汽车,并实时进行汽车交通监测。最近根据神经网络的演进提出了几种深层次的学习技术,用于计算机视觉的实时分类和识别。然而,它们的性能取决于其使用的情景。在本文件中,我们调查了两种最先进的CNN算法,即快速R-CNN和YOLOv3在从空中图像探测汽车的过程中的性能。我们在从UAVs拍摄的大型汽车数据集上培训和测试了这两个模型。我们在本文中表明,YOLOv3在敏感度和处理时间上优于更快R-CN,尽管它们在精确度上是可比的。