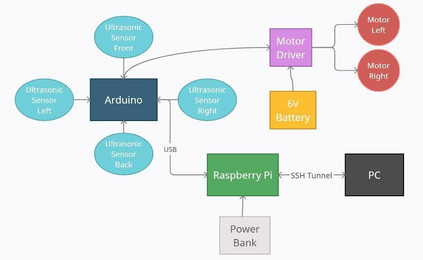
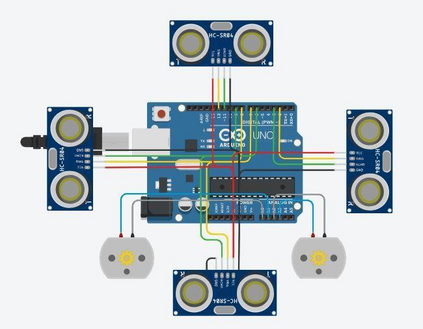
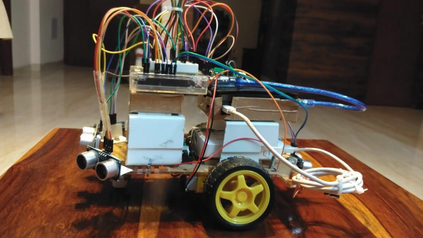
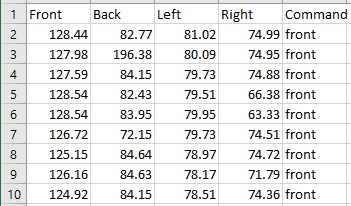
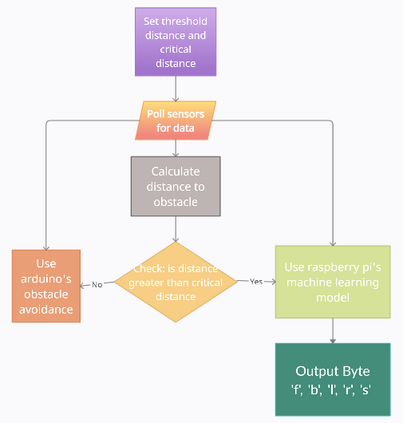
Local or reactive navigation is essential for autonomous mobile robots which operate in an indoor environment. Techniques such as SLAM, computer vision require significant computational power which increases cost. Similarly, using rudimentary methods makes the robot susceptible to inconsistent behavior. This paper aims to develop a robot that balances cost and accuracy by using machine learning to predict the best obstacle avoidance move based on distance inputs from four ultrasonic sensors that are strategically mounted on the front, front-left, front-right, and back of the robot. The underlying hardware consists of an Arduino Uno and a Raspberry Pi 3B. The machine learning model is first trained on the data collected by the robot. Then the Arduino continuously polls the sensors and calculates the distance values, and in case of critical need for avoidance, a suitable maneuver is made by the Arduino. In other scenarios, sensor data is sent to the Raspberry Pi using a USB connection and the machine learning model generates the best move for navigation, which is sent to the Arduino for driving motors accordingly. The system is mounted on a 2-WD robot chassis and tested in a cluttered indoor setting with most impressive results.
翻译:本地或反应式导航对于在室内环境中运行的自主移动机器人至关重要。 诸如 SLAM 等技术, 计算机视觉需要巨大的计算能力, 从而增加成本。 同样, 使用初级方法使机器人容易出现不一致的行为 。 本文旨在开发一个机器人, 通过机器学习来预测最佳障碍避免移动, 以四种超声波传感器的距离输入为基础, 这四种超声波传感器在机器人的前端、 前左侧、 前右侧和后背上安装。 基本硬件包括一个 Arduino Uno 和一个 Raspberry Pi 3B 。 机器学习模型首先用机器人收集的数据来训练。 然后Arduino 持续测试传感器并计算距离值, 并在有关键需要避免的情况下, 由Arduino 进行适当的操作。 在其他情况下, 传感器数据会用USB 连接到 Raspberry Pi, 机器学习模型产生最佳导航动作, 并据此发送到 Arduino 用于驱动发动机的 Arduino 。 系统将安装在一台2WD 机器人的底盘上, 测试结果最惊人的室内设置 。