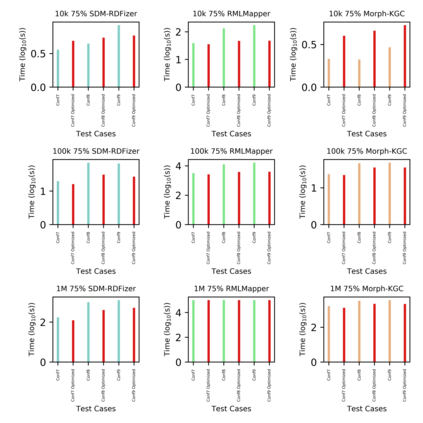
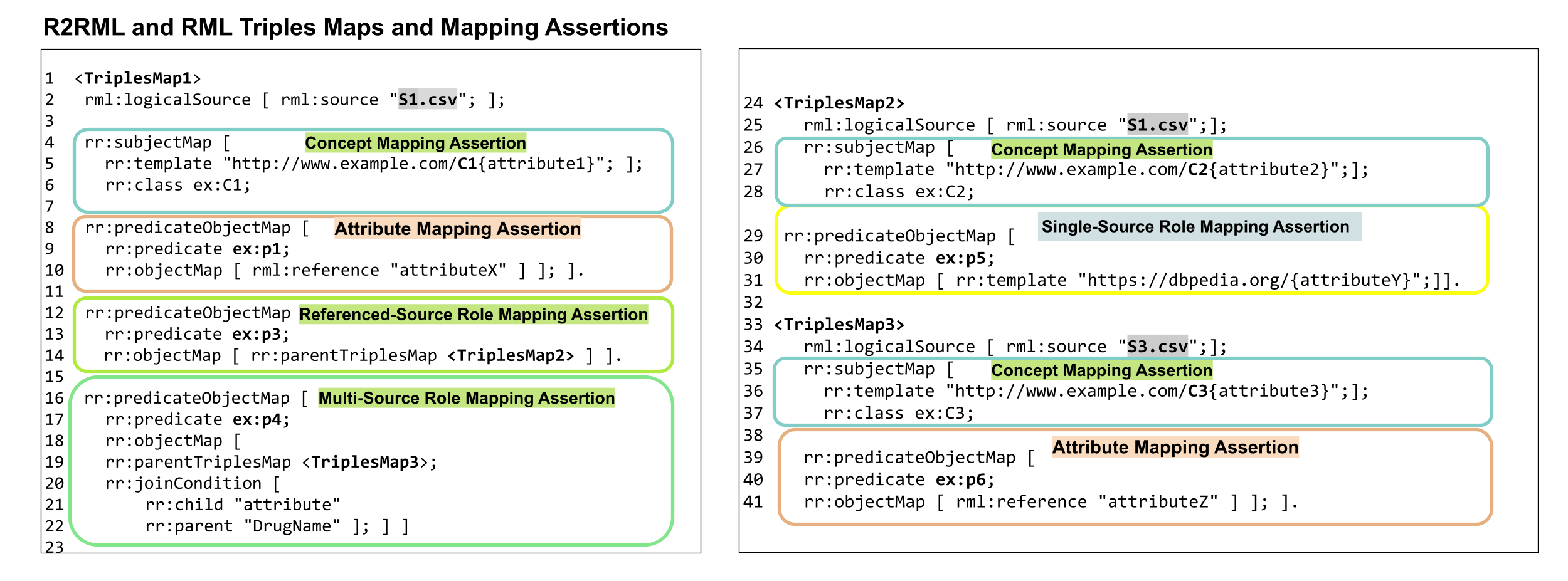
RDF knowledge graphs (KG) are powerful data structures to represent factual statements created from heterogeneous data sources. KG creation is laborious and demands data management techniques to be executed efficiently. This paper tackles the problem of the automatic generation of KG creation processes declaratively specified; it proposes techniques for planning and transforming heterogeneous data into RDF triples following mapping assertions specified in the RDF Mapping Language (RML). Given a set of mapping assertions, the planner provides an optimized execution plan by partitioning and scheduling the execution of the assertions. First, the planner assesses an optimized number of partitions considering the number of data sources, type of mapping assertions, and the associations between different assertions. After providing a list of partitions and assertions that belong to each partition, the planner determines their execution order. A greedy algorithm is implemented to generate the partitions' bushy tree execution plan. Bushy tree plans are translated into operating system commands that guide the execution of the partitions of the mapping assertions in the order indicated by the bushy tree. The proposed optimization approach is evaluated over state-of-the-art RML-compliant engines, and existing benchmarks of data sources and RML triples maps. Our experimental results suggest that the performance of the studied engines can be considerably improved, particularly in a complex setting with numerous triples maps and large data sources. As a result, engines that time out in complex cases are enabled to produce at least a portion of the KG applying the planner.
翻译:RDF 知识图形( KG) 是强大的数据结构, 代表来自不同数据源的事实陈述。 KG 创建是艰巨的, 要求高效地执行数据管理技术。 本文解决了自动生成 KG 创建过程的自动生成问题, 明确指定了; 提出了在RDF 绘图语言( RML) 中指定绘图参数之后, 规划和将不同数据转换成 RDF 的三重 RDF 数据的技术。 鉴于一组绘图数据, 规划员通过分隔和安排执行声明的时间, 提供了最优化的执行计划。 首先, 规划员评估了最佳的分区数量, 考虑了数据源的数量、 绘图声明的类型和不同主张之间的关联。 在提供了属于每个分区的分区和主张的清单之后, 规划员决定了它们的执行顺序。 实施贪婪的算法是为了生成分区的灌木树执行计划( RDF) 。 布希的树计划被转换成操作系统命令, 用以指导在灌木树 指示的顺序下执行绘图的分区。 拟议的优化方法被评估了最先进的RML 引擎的发动机和现有三重数据结果, 。 在复杂的引擎中, 我们的实验性数据源中可以大量地标中, 。