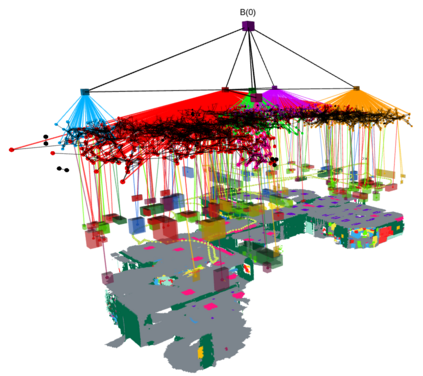
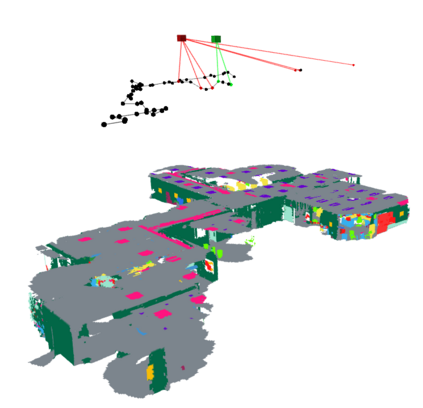
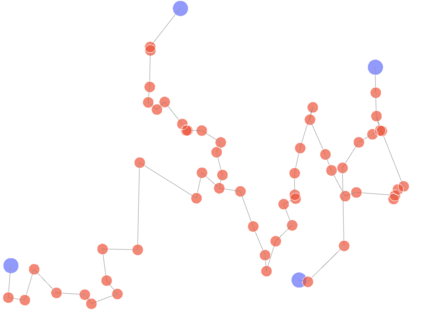
For a multi-robot team that collaboratively explores an unknown environment, it is of vital importance that collected information is efficiently shared among robots in order to support exploration and navigation tasks. Practical constraints of wireless channels, such as limited bandwidth and bit-rate, urge robots to carefully select information to be transmitted. In this paper, we consider the case where environmental information is modeled using a 3D Scene Graph, a hierarchical map representation that describes geometric and semantic aspects of the environment. Then, we leverage graph-theoretic tools, namely graph spanners, to design heuristic strategies that efficiently compress 3D Scene Graphs to enable communication under bandwidth constraints. Our compression strategies are navigation-oriented in that they are designed to approximately preserve shortest paths between locations of interest, while meeting a user-specified communication budget constraint. Effectiveness of the proposed algorithms is demonstrated via extensive numerical analysis and on synthetic robot navigation experiments in a realistic simulator.
翻译:对于合作探索未知环境的多机器人团队来说,收集的信息在机器人之间有效共享至关重要,以支持勘探和导航任务。无线频道的实际限制,例如带宽和比特率有限,敦促机器人仔细选择要传递的信息。在本文中,我们考虑环境信息使用3D景象图模型进行模型化的情况,3D景象图是一个分级图示,描述环境的几何和语义方面。然后,我们利用图形光谱仪等图形理论工具,设计出能高效压缩 3D 景象图以在带宽限制下进行通信的超常策略。我们的压缩策略以导航为导向,设计这些策略的目的是在相关地点之间大致保持最短的路径,同时满足用户指定的通信预算限制。通过广泛的数字分析以及现实模拟器的合成机器人导航实验,可以证明拟议算法的有效性。