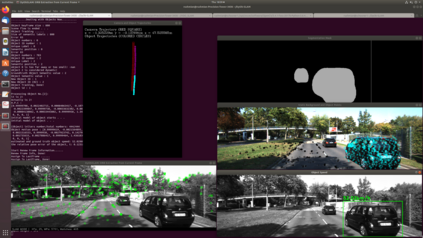
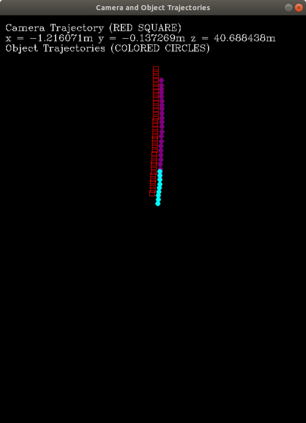
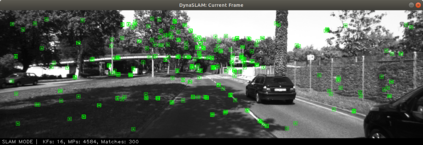
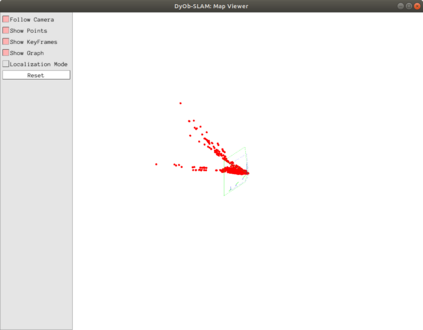
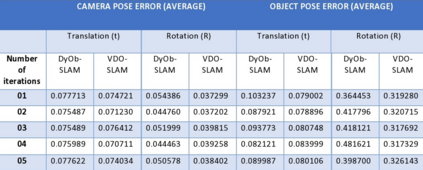
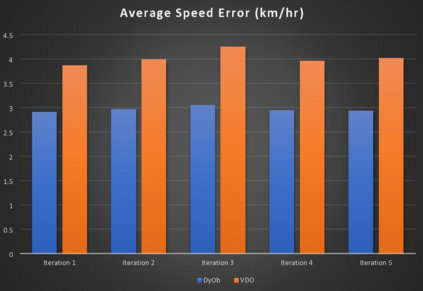
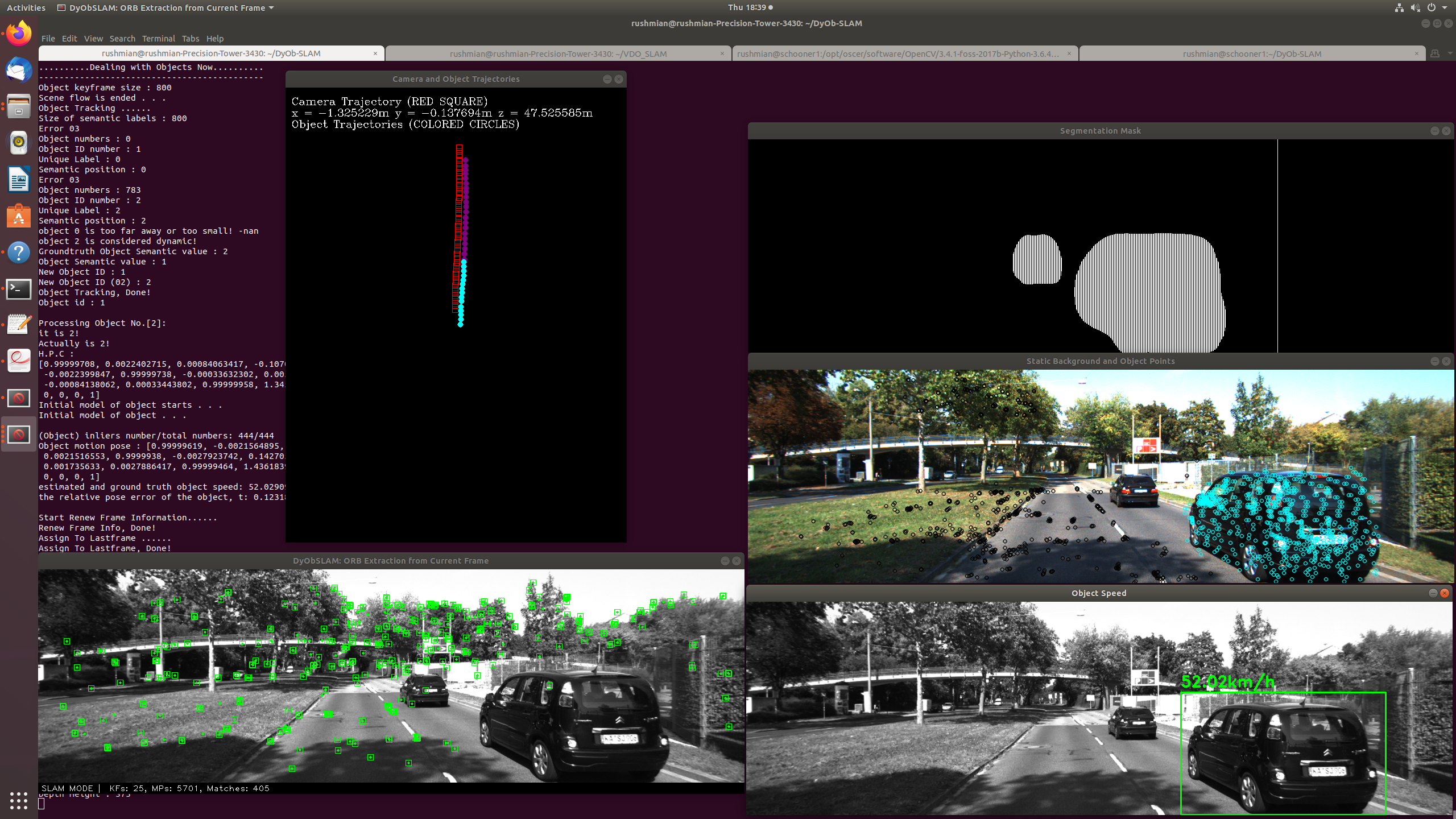
Simultaneous Localization & Mapping (SLAM) is the process of building a mutual relationship between localization and mapping of the subject in its surrounding environment. With the help of different sensors, various types of SLAM systems have developed to deal with the problem of building the relationship between localization and mapping. A limitation in the SLAM process is the lack of consideration of dynamic objects in the mapping of the environment. We propose the Dynamic Object Tracking SLAM (DyOb-SLAM), which is a Visual SLAM system that can localize and map the surrounding dynamic objects in the environment as well as track the dynamic objects in each frame. With the help of a neural network and a dense optical flow algorithm, dynamic objects and static objects in an environment can be differentiated. DyOb-SLAM creates two separate maps for both static and dynamic contents. For the static features, a sparse map is obtained. For the dynamic contents, a trajectory global map is created as output. As a result, a frame to frame real-time based dynamic object tracking system is obtained. With the pose calculation of the dynamic objects and camera, DyOb-SLAM can estimate the speed of the dynamic objects with time. The performance of DyOb-SLAM is observed by comparing it with a similar Visual SLAM system, VDO-SLAM and the performance is measured by calculating the camera and object pose errors as well as the object speed error.
翻译:同步本地化和绘图( SLAM) 是一个在周围环境对象本地化和绘图之间建立相互关系的过程。 在不同传感器的帮助下, 各类 SLAM 系统已经开发出各种类型的 SLAM 系统, 以解决建立本地化和映射之间的关系问题。 SLAM 进程的一个局限性是在环境映射中缺乏对动态物体的考虑。 我们提议了动态物体跟踪 SLAM (DyOb- SLAM) 系统, 这是一种视觉 SLAM 系统, 可以在环境周围对象的定位和绘图以及跟踪每个框架的动态对象。 在神经网络和密集的光学流算法的帮助下, 各种类型的 SLAM 系统已经开发出各种动态物体, DyOb- SLAM 系统可以将动态物体的性能与动态物体的性能进行对比, 以SLASM 系统所观测到的性能速度, 将VOAM 系统与所观测到的动态物体的性能速度进行对比。