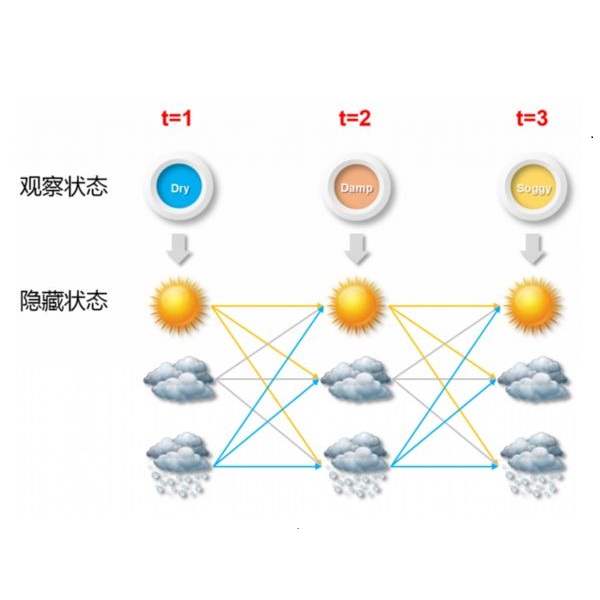
Humans make daily routine decisions based on their internal states in intricate interaction scenarios. This paper presents a probabilistically reconstructive learning approach to identify the internal states of multi-vehicle sequential interactions when merging at highway on-ramps. We treated the merging task's sequential decision as a dynamic, stochastic process and then integrated the internal states into an HMM-GMR model, a probabilistic combination of an extended Gaussian mixture regression (GMR) and hidden Markov models (HMM). We also developed a variant expectation-maximum (EM) algorithm to estimate the model parameters and verified it based on a real-world data set. Experiment results reveal that three interpretable internal states can semantically describe the interactive merge procedure at highway on-ramps. This finding provides a basis to develop an efficient model-based decision-making algorithm for autonomous vehicles (AVs) in a partially observable environment.
翻译:人类在复杂的互动假设情景中根据内部状态做出日常的日常决定。本文件介绍了一种概率再现的学习方法,用以在高速上斜坡上合并时确定多车辆相继相互作用的内部状态。我们把合并任务的顺序决定视为动态的、随机的过程,然后将内部状态纳入HMM-GMR模型,一种延长高斯混合回归(GMR)和隐藏的Markov模型(HMM)的概率组合。我们还开发了一种变式最大预期算法,以估计模型参数,并根据真实世界数据集进行验证。实验结果显示,三个可解释的内部状态可以对高速上斜坡上的交互式合并程序进行语义描述。这一发现为在部分可观察的环境中为自治车辆制定高效的模型决策算法提供了基础。