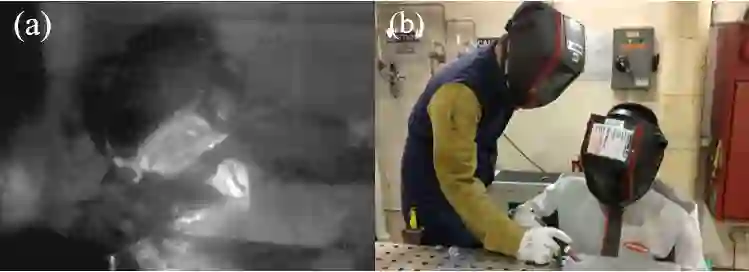
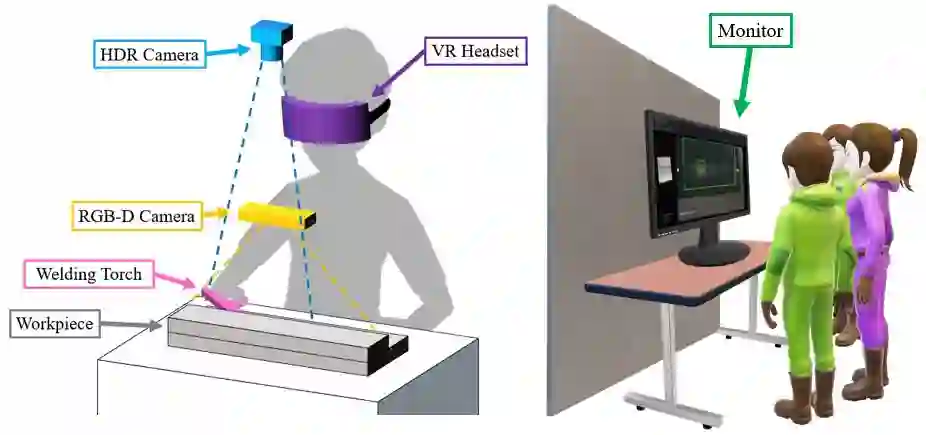
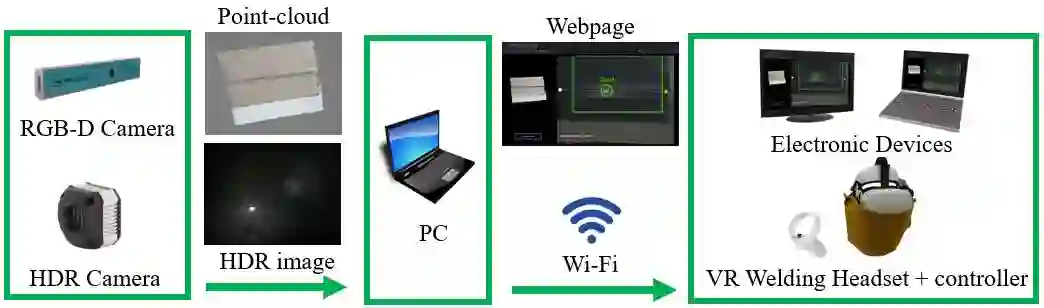
This paper presents the development of a multi-sensor extended reality platform to improve the teaching and learning experience of arc welding tasks. Traditional methods to acquire hand-eye welding coordination skills are typically conducted through one-to-one instruction where trainees/trainers must wear protective helmets and conduct several hands-on tests with metal workpieces. This approach is inefficient as the harmful light emitted from the electric arc impedes the close monitoring of the welding process (practitioners can only observe a small bright spot and most geometric information cannot be perceived). To tackle these problems, some recent training approaches have leveraged on virtual reality (VR) as a way to safely simulate the process and visualize the geometry of the workpieces. However, the synthetic nature of the virtual simulation reduces the effectiveness of the platform; It fails to comprise actual interactions with the welding environment, which may hinder the learning process of a trainee. To incorporate a real welding experience, in this work we present a new automated multi-sensor extended reality platform for arc welding training. It consists of three components: (1) An HDR camera, monitoring the real welding spot in real-time; (2) A depth sensor, capturing the 3D geometry of the scene; and (3) A head-mounted VR display, visualizing the process safely. Our innovative platform provides trainees with a "bot trainer", virtual cues of the seam geometry, automatic spot tracking, and a performance score. To validate the platform's feasibility, we conduct extensive experiments with several welding training tasks. We show that compared with the traditional training practice and recent virtual reality approaches, our automated method achieves better performances in terms of accuracy, learning curve, and effectiveness.
翻译:本文介绍了一个多传感器扩展的现实平台的开发,目的是改善电弧焊接任务的教学和学习经验; 获取手眼焊接协调技能的传统方法通常通过一对一的教学进行,受训人员/教练必须佩戴防护头盔,并用金属工件进行几次亲身测试; 这种方法效率低下,因为电弧发出的有害光阻碍对焊接进程的密切监测(活化者只能看到一个小亮点,而且无法看到大多数虚拟信息); 为了解决这些问题,最近的一些培训方法利用了虚拟现实(VR),作为安全模拟过程和对工作机件的几何测量方法。 然而,虚拟模拟的合成性质降低了平台的效能; 它无法包含与焊接环境的实际互动,这可能会妨碍对培训过程的学习过程。 在这个工作中,我们展示了一个新的自动化的多传感器或扩大的网络化平台,用于焊接培训。 它由三个组成部分组成:(1) IMDR相机, 显示我们真实的直观操作过程, 显示我们真实的直径的深度; 显示我们的直观操作过程; 显示我们的直观的直径; 显示的直观操作过程。