
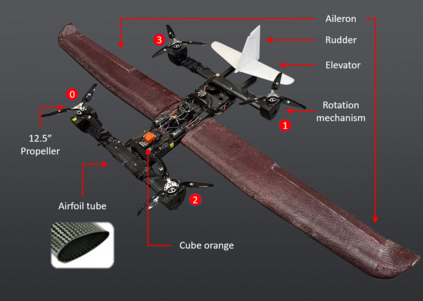
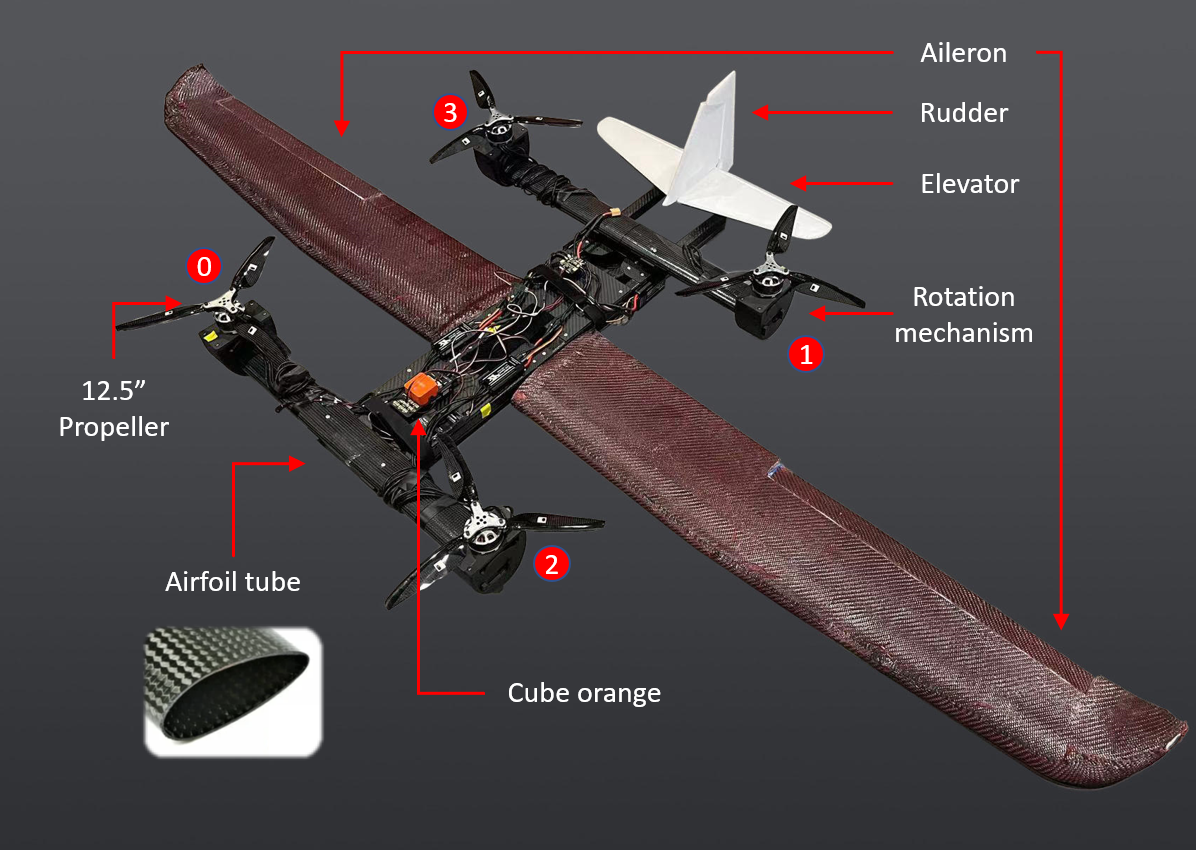
Providing both the vertical take-off and landing capabilities and the ability to fly long distances to aircraft opens the door to a wide range of new real-world aircraft applications while improving many existing applications. Tiltrotor vertical take-off and landing (VTOL) unmanned aerial vehicles (UAVs) are a better choice than fixed-wing and multirotor aircraft for such applications. Prior work on these aircraft has addressed the aerodynamic performance, design, modeling, and control. However, a less explored area is the study of their potential fault tolerance due to their inherent redundancy, which allows them to sustain some degree of actuator failure. This work introduces tolerance to several types of actuator failures in a tiltrotor VTOL aircraft. We discuss the design and model of a custom tiltrotor VTOL UAV, which is a combination of a fixed-wing aircraft and a quadrotor with tilting rotors, where the four propellers can be rotated individually. Then, we analyze the feasible wrench space the vehicle can generate and design the dynamic control allocation so that the system can adapt to actuator failure, benefiting from the configuration redundancy. The proposed approach is lightweight and is implemented as an extension to an already existing flight control stack. Extensive experiments are performed to validate that the system can maintain the controlled flight under different actuator failures. To the best of our knowledge, this work is the first study of the tiltrotor VTOL's fault-tolerance that exploits the configuration redundancy.
翻译:提供垂直起飞和着陆能力,以及长距离飞行到飞机的能力,都提供垂直起飞和着陆能力,从而在改进许多现有应用的同时,为各种新的真实世界飞机应用打开了大门。旋转式垂直起飞和着陆无人驾驶飞行器(VTOL)比固定式和多旋转式飞机(UAV)更能选择这种应用。这些飞行器以前的工作涉及空气动力性能、设计、建模和控制。然而,一个探索较少的领域是研究它们由于固有的冗余力而可能造成的误差容忍度,从而使它们能够保持某种程度的动画器故障。这项工作对倾斜式自动起飞和着陆(VTOL)无人驾驶飞行器(VTO)机(VTO)机(UAV)的几类动动动动动动动画失灵提供了容忍度。我们讨论的定制倾斜式倾斜式机(VTO)的设计和模型,这是固定式旋转式旋转器的组合。然后,我们分析该飞行器能够产生可行的振动空间,设计动态控制配置,以便系统能够适应电动操纵器故障,从而适应操作式飞行机变压性飞行失常状态,从进行最佳的飞行变压试验,这是拟议的飞行变压式实验法下的最佳演算法。提议,这是在进行中进行最佳的飞行变换。

相关内容

- Today (iOS and OS X): widgets for the Today view of Notification Center
- Share (iOS and OS X): post content to web services or share content with others
- Actions (iOS and OS X): app extensions to view or manipulate inside another app
- Photo Editing (iOS): edit a photo or video in Apple's Photos app with extensions from a third-party apps
- Finder Sync (OS X): remote file storage in the Finder with support for Finder content annotation
- Storage Provider (iOS): an interface between files inside an app and other apps on a user's device
- Custom Keyboard (iOS): system-wide alternative keyboards
Source: iOS 8 Extensions: Apple’s Plan for a Powerful App Ecosystem



