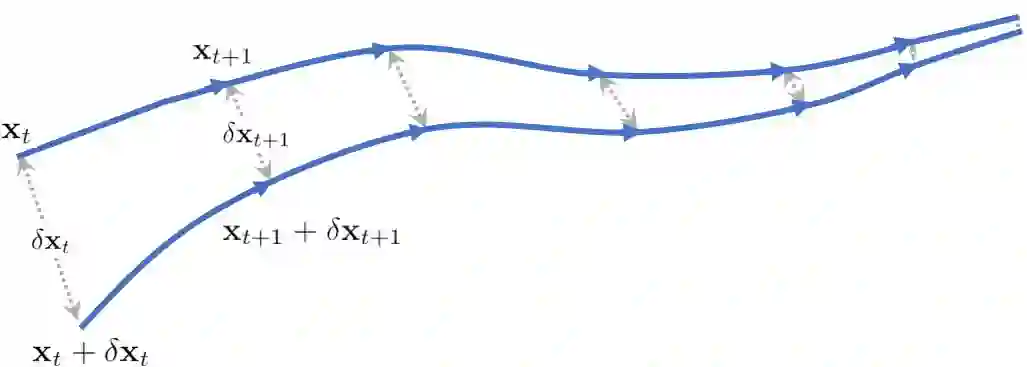
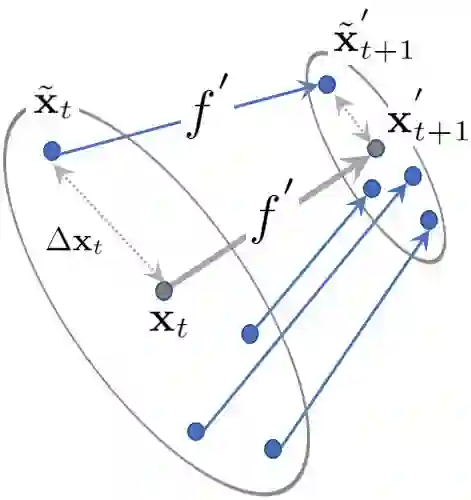
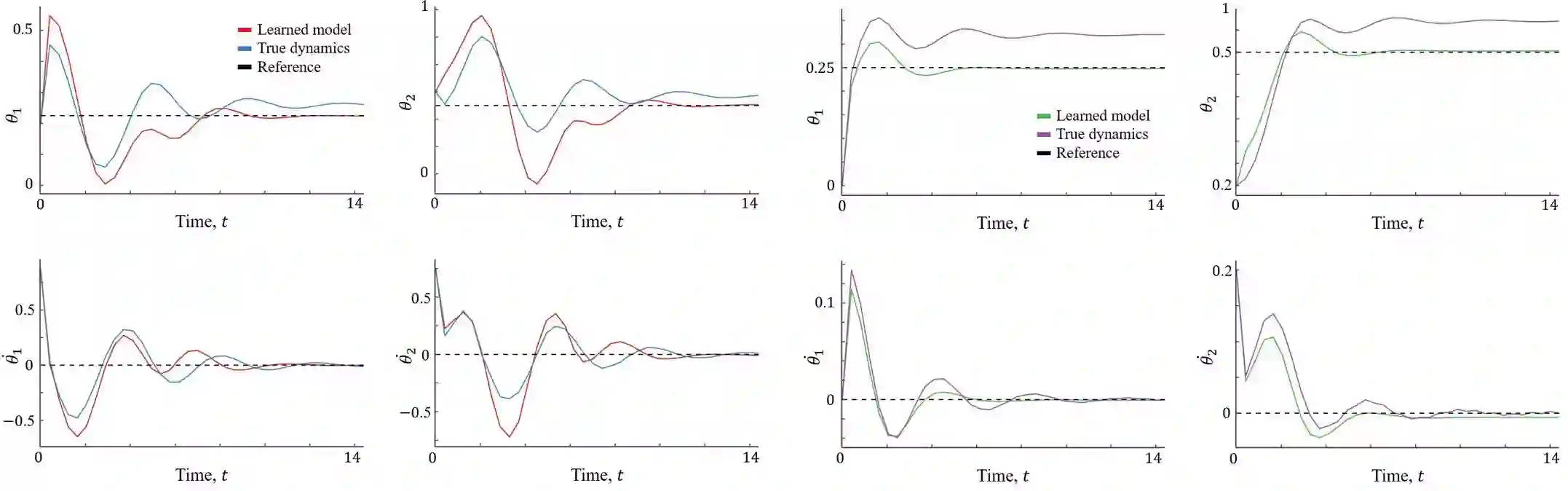
This paper proposes a data-driven method for learning convergent control policies from offline data using Contraction theory. Contraction theory enables constructing a policy that makes the closed-loop system trajectories inherently convergent towards a unique trajectory. At the technical level, identifying the contraction metric, which is the distance metric with respect to which a robot's trajectories exhibit contraction is often non-trivial. We propose to jointly learn the control policy and its corresponding contraction metric while enforcing contraction. To achieve this, we learn an implicit dynamics model of the robotic system from an offline data set consisting of the robot's state and input trajectories. Using this learned dynamics model, we propose a data augmentation algorithm for learning contraction policies. We randomly generate samples in the state-space and propagate them forward in time through the learned dynamics model to generate auxiliary sample trajectories. We then learn both the control policy and the contraction metric such that the distance between the trajectories from the offline data set and our generated auxiliary sample trajectories decreases over time. We evaluate the performance of our proposed framework on simulated robotic goal-reaching tasks and demonstrate that enforcing contraction results in faster convergence and greater robustness of the learned policy.
翻译:本文建议了一种数据驱动方法, 利用 Contraction 理论从离线数据中学习趋同的控制政策。 合同理论有助于构建一种政策, 使闭环系统轨迹必然会趋同于独特的轨迹。 在技术层面, 确定收缩度量, 也就是机器人的轨迹显示收缩通常非三角的距离度量。 我们提议在强制收缩的同时, 共同学习控制政策及其相应的收缩度度量。 为了实现这一目标, 我们从由机器人状态和输入轨迹组成的离线数据集中学习机器人系统隐含的动态模型。 我们使用这一学习过的动态模型, 提出数据增强算法, 用于学习收缩政策。 我们随机在状态空间生成样本, 并通过学习的动态模型向前传播这些样本, 以产生辅助的样本轨迹。 我们然后学习控制政策和收缩度测量尺度, 以便让轨迹与离离线数据集和我们生成的辅助样本轨迹轨迹随时间下降。 我们评估了我们所拟议的模型在测测测测的较快的磁性目标任务中, 展示了更快速的收缩性政策结果。