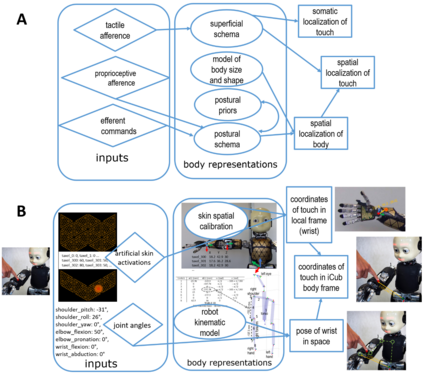
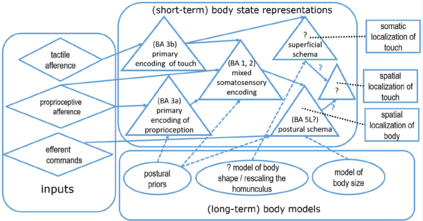
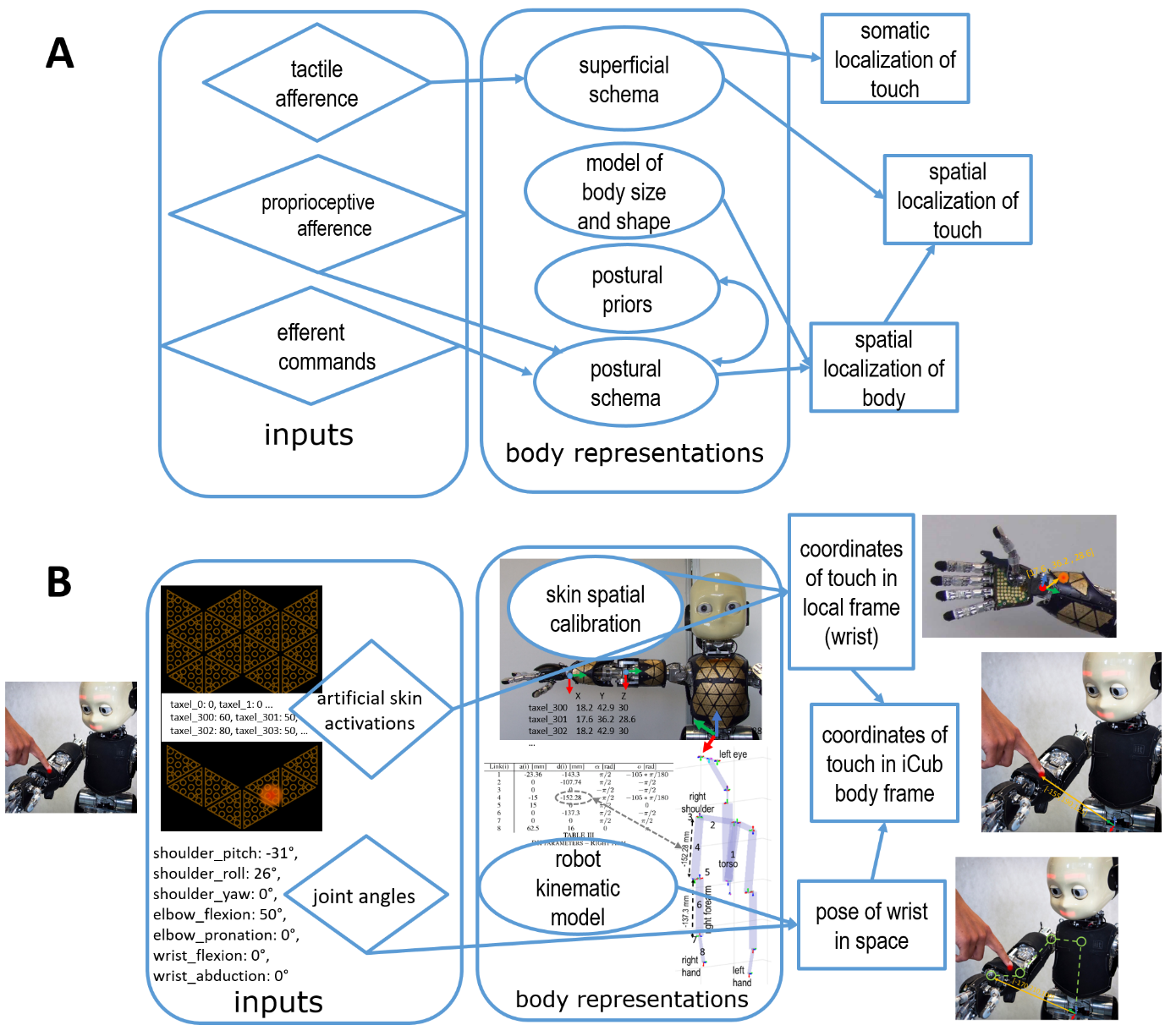
Neurocognitive models of higher-level somatosensory processing have emphasised the role of stored body representations in interpreting real-time sensory signals coming from the body (Longo, Azanon and Haggard, 2010; Tame, Azanon and Longo, 2019). The need for such stored representations arises from the fact that immediate sensory signals coming from the body do not specify metric details about body size and shape. Several aspects of somatoperception, therefore, require that immediate sensory signals be combined with stored body representations. This basic problem is equally true for humanoid robots and, intriguingly, neurocognitive models developed to explain human perception are strikingly similar to those developed independently for localizing touch on humanoid robots, such as the iCub, equipped with artificial electronic skin on the majority of its body surface (Roncone et al., 2014; Hoffmann, 2021). In this chapter, we will review the key features of these models, discuss their similarities and differences to each other, and to other models in the literature. Using robots as embodied computational models is an example of synthetic methodology or 'understanding by building' (e.g., Hoffmann and Pfeifer, 2018), computational embodied neuroscience (Caligiore et al., 2010) or 'synthetic psychology of the self' (Prescott and Camilleri, 2019). Such models have the advantage that they need to be worked out into every detail, making any theory explicit and complete. There is also an additional way of (pre)validating such a theory other than comparing to the biological or psychological phenomenon studied by simply verifying that a particular implementation really performs the task: can the robot localize where it is being touched (see https://youtu.be/pfse424t5mQ)?
翻译:高层次血清处理的内分泌模型强调了储存体表在解释来自人体的实时感官信号方面所起的作用(Longo、Azaron和Haggard,2010年;Tame、Azaron和Longo,2019年)。这种储存体表征之所以有必要,是因为来自身体的即时感官信号没有具体说明关于身体大小和形状的计量细节。因此,Somataception的一些方面要求将即时感官信号与储存体积显示结合起来。对于人体机器人来说,这一基本问题也同样如此,令人不解的是,为解释人体感官信号而开发的神经感官理论模型与为将人体机器人接触本地化而独立开发的模型非常相似,例如iCub,其大部分身体表面(Roncone等人,2014年;Hoffmann,2021年)。在本章中,我们将审查这些模型的关键特征,讨论它们彼此的相似性和差异,以及文献中的其他模型。使用机器人作为计算计算模型, 也通过合成法研究其他的自我分析方法, 将这种模型进行。