

项目名称: 控制导管螺旋桨、机器人本体与脐带缆耦合作用下带缆遥控水下机器人水动力问题研究
项目编号: No.11372112
项目类型: 面上项目
立项/批准年度: 2013
项目学科: 数理科学和化学
项目作者: 吴家鸣
作者单位: 华南理工大学
项目金额: 76万元
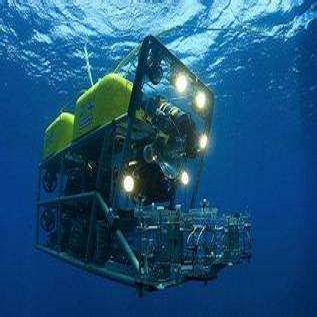
中文摘要: 本项目研究带缆遥控水下机器人系统在操纵控制过程中、在组成水下机器人的三个子系统动力因素耦合作用影响下的水动力基础理论与数值模拟问题。研究中,将导出控制螺旋桨、机器人本体与脐带缆相互耦合形式的水下机器人系统水动力整体数学模型;提出一个将水下机器人与控制螺旋桨组合为一个整体、以CFD手段来确定水下机器人在操纵控制过程中水动力载荷与螺旋桨控制力的数值方法;建立适用于带缆遥控水下机器人低张力脐带缆力学特征的数学模型;发展利用水下超声波测距系统进行带缆遥控水下机器人轨迹与姿态检测技术。通过数值模拟配合实验室样机试验,观察机器人系统在其轨迹与姿态操纵控制过程中的动力状态,分析机器人系统中各组成部分的动力特征及其它们之间的相互动力关系,探讨在特定的海洋环境与轨迹与姿态控制要求条件下维持水下机器人姿态稳定的水动力本质及其对其进行有效控制的机理。
中文关键词: 水下机器人;脐带缆;导管螺旋桨;CFD;耦合
英文摘要: The common basic theory and numerical simulation problems of remote control tethered underwater robot systems during control manipulations with coupled hydrodynamic effects of three sub-system considered in the robot are investigated. In the research, the
英文关键词: Underwater robot;umbilical cable;ducted propeller;CFD;coupled
成为VIP会员查看完整内容
相关内容
Arxiv
0+阅读 · 2022年4月19日
Arxiv
0+阅读 · 2022年4月18日
Arxiv
0+阅读 · 2022年4月15日
相关VIP内容
相关资讯