【AI唠科】Focal Loss:助大神何凯明获得ICCV最佳学生论文,究竟有什么功?|兼谈目标检测发展历程
【导读】Focal Loss打败了所有state-of-the-art的算法,而且竟然在速度上也是一马当先,可以说相当有说服力。但是作者为了证明Focal Loss的有效性,并没有设计更新颖的网络,这与其他算法提高精确度的做法是不一样的——他们要么改造原有算法的网络结构,要么另辟蹊径。
一、引言:何凯明又拿下了ICCV最佳论文
前些日子,计算机视觉三大顶会之一ICCV公布了获奖论文,连续三次获得最佳论文的何凯明再次成为刷屏网红。另外,何恺明参与的Focal Loss for Dense Object Detection,也被大会评为了最佳学生论文。

何恺明和 Ross B. Girshick
这篇最佳学生论文提出了一个十分新颖的观点,颠覆了很多人对one-stage detector的看法。在这篇论文之前,很多人认为one-stage detector在进行目标检测中效果不够好的原因是它使用的feature不够准确,所以经过ROI pooling得到更精确的表示,也就是改造成two-stage detector。但是这篇文章证实了并不是因为feature并不够精确,而是另有缘由。
讲到这里,有必要介绍一下目标检测这一领域的主流思想。
二、目标检测的主流算法
在Focal Loss这篇论文中,作者将目标检测方法分为两类:根据是否存在专门提取候选框的子网络,将目前的主流算法分为one-stage和two-stage。所谓one-stage,就是不存在提取候选框的子网络,直接对整个图像所有的可能目标区域进行直接密集检测。而所谓two-stage算法,就是存在将候选目标区域稀疏化的分类器。理论上讲,one-stage法更简单,也更快,但是在实际运用中,发现one-stage方法在准确度上要输给two-stage方法很多,所以后来two-stage方法就占据了主流。
除了one-stage和two-stage方法,就是传统目标检测算法了。传统的目标检测方法大致在2014年以前占据主流,大都有着SVM和boosting的思想在里面,其流程可以用下面这张图来表示:

首先在给定的图像上选出更可能存在目标物体的候选区域,然后对这些区域进行特征提取,最后就是用训练好的分类器进行分类。这种方法的效果并不理想,尽管当时很多学者进行了各种改进,但是最根本的两个缺点一直没有被克服。
第一个缺点就是在区域选择的时候,由于目标物体的大小、位置、长宽比等信息均不能确定,所以需要采用不同尺寸和长宽比的滑动窗口遍历整个图像,这种方法从理论上保证了能够找到目标物体的位置,但是需要极大的运算量,时间复杂度极高,冗余窗口在所有窗口中的占比也非常高,严重影响了后续特征提取已经分类的速度。第二个缺点就是由于目标特征的可变性,以及背景的变化等情况,使得提取到鲁棒的特征并不容易,在实践中如果得不到合适的特征会严重影响分类的准确性。
传统目标检测算法的缺点根植于算法的基本思想上,难以改进,所以当深度学习在目标分类领域证实了其卓越的有效性之后,RBG大神推出了利用深度学习进行目标检测的开山之作——R-CNN,Ross Girshick在推出R-CNN算法之后,又不断改进,多次在PASCAL VOC的目标检测竞赛中夺冠,并于2010年获得终身成就奖。RBG随后提出的fast R-CNN以及与何恺明合作推出的faster R-CNN,成为多年来目标检测领域最流行也最work的系列方法。
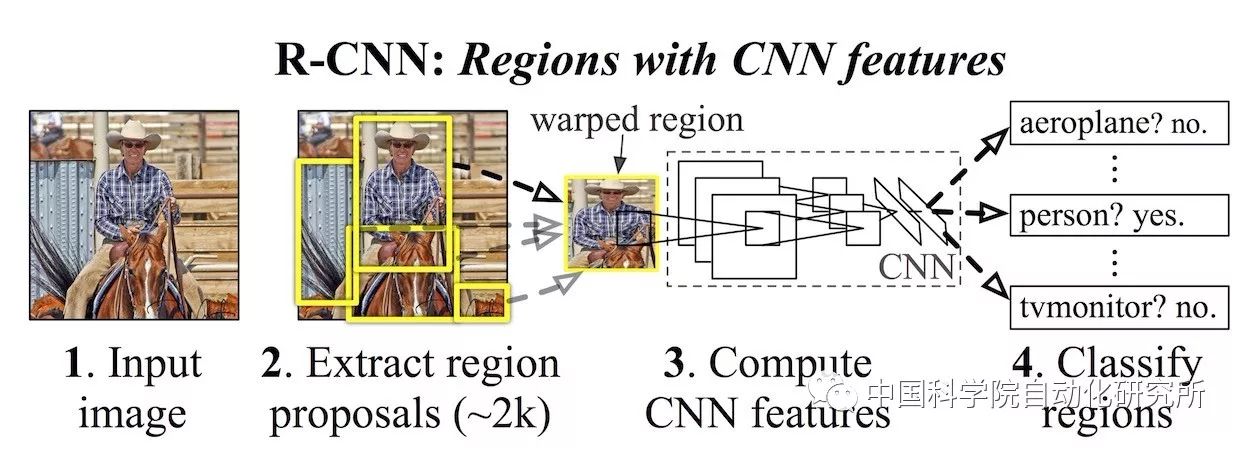
R-CNN,fast R-CNN和faster R-CNN,它们共同的地方是在于都用了region proposal方法大幅减少了目标候选框的数量,使其在数千的数量级上就有相当高的准确度。但是R-CNN存在着对相互重叠的候选框进行重复特征提取的缺点,这一部分是很耗时的,当候选框只有数千时,也成为整个算法中耗时占比相当多的一步。
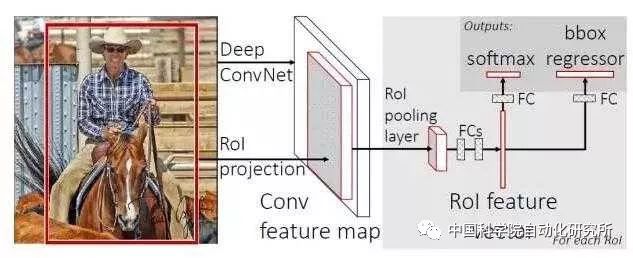
fastR-CNN
为了改进这个缺点,RBG借鉴何恺明的SPP-Net提出了fast R-CNN。Fast R-CNN与R-CNN最大的区别就是fast R-CNN不是对每个候选框单独进行特征提取,而是对整个图像进行特征提取,在提取特征之后才进行候选框的划分,这就避免了对重叠候选框的重复计算。另外,fast R-CNN提出了ROI pooling层概念,ROI pooling层可以看作单层的SPP-net。在R-CNN中,对候选框进行卷积操作时,由于卷积操作需要固定大小的输入图像,而候选框的大小又是不确定的,所以需要对候选框进行变形操作以满足需求,这不仅导致多余的操作,而且变形可能导致特征提取效果不够理想。而SPP-net可以直接对不同尺寸的候选框进行处理,这就保证了很好的分类效果。
但是,fast R-CNN还是不够快,找出所有的候选框还是需要耗费数秒的时间,不能满足实时分类的性能要求。于是,RBG与何恺明合作提出了性能更好的faster R-CNN。既然对单幅图像用selective search方法提取proposal就要数秒的时间,那就设计新的方法提取proposal。这种新的方法就是RPN网络(Region Proposal Networks)。
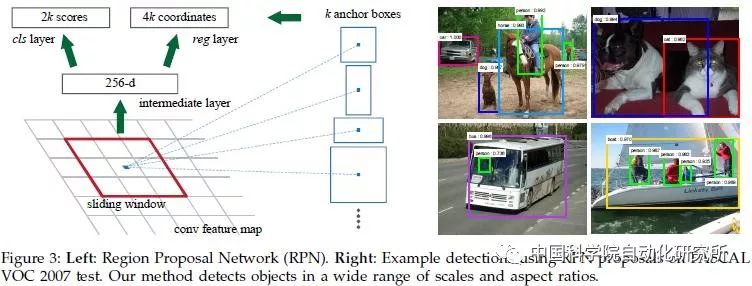
RPN的巧妙之处在于利用全卷积网络直接对整幅图像提取proposal,然后再将提取到的proposal交给fast R-CNN模块进行检测。尽管在RPN中采用了本应十分耗时的滑动窗口策略,但是由于滑动操作是在卷积层feature map上进行的,尺度相比原图像减小了很多,所以并不费时。尽管faster R-CNN的速度和精度又得到了很大的提升,但是仍然不能做到实时的目标检测,需要通过RPN网络预先获得region proposal,然后才对每个proposal进行分类和精修。
总的来说,R-CNN,fast R-CNN,faster R-CNN这一系列的成果,使得深度学习在目标检测领域得到广泛的应用,算法的流程也日趋简单,精度不断提高,可以说这一系列基于region proposal的目标检测方法仍然是目标检测领域最主要的一个分支。
基于region proposal的算法都是two-stage的,他们的主要缺点就是速度不够快,尽管每年都有非常新颖的算法提出,但是在速度方面并没有质的飞跃。而相对而言,one-stage的主要优势就是网络简单,速度够快,那么有没有精度能与two-stage算法匹敌的one-stage算法呢?答案是有的,这就是接下来要介绍的YOLO和SSD算法。
YOLO流程图
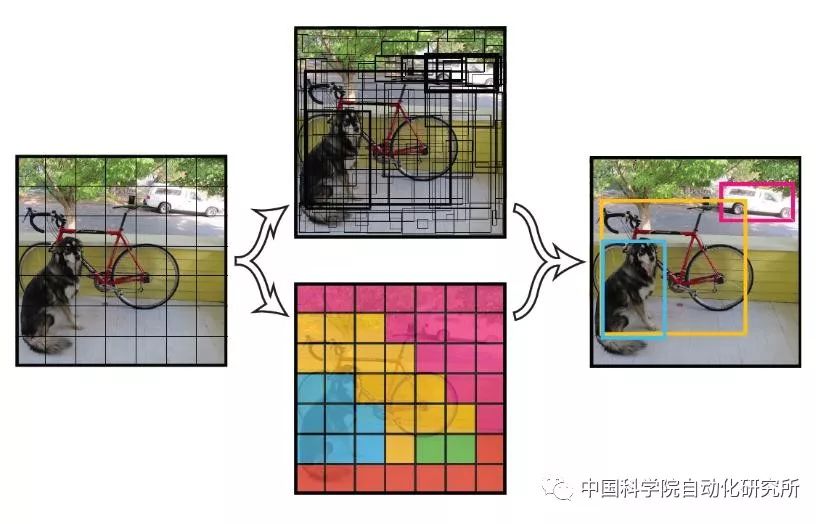
YOLO(You Only Look Once)是一个可以一次性预测多个Box位置和类别的卷积神经网络,能够实现端到端的目标检测和识别,其最大的优势就是速度快。YOLO有着极为简单的模型,它没有选择滑窗或者提取proposal的方式进行网络的训练,而是直接选用整幅图训练模型。这种方式可以更好地区分背景区域和目标区域,而不会出现proposal方法中将背景区域误判为目标的情况。当然,速度上的提升也导致了精度上的一些牺牲,YOLO简单粗暴地对图像进行网格划分,然后再对网格进行处理,这就会导致定位不精确的问题,YOLO的识别精度并比不上当时精度最高的faster R-CNN方法。
Faster R-CNN的定位相比于YOLO要精确得多,那把YOLO和faster R-CNN中关于定位的部分结合起来会怎样呢?这就有了SSD(Single Shot MultiBox Detector),其结果相比YOLO提高了很多。
三、Focal Loss:速度上一马当先
YOLO和SSD可以算one-stage算法里的佼佼者,加上R-CNN系列算法,这几种算法可以说是目标检测领域非常经典的算法了。这几种算法在提出之后经过数次改进,都得到了很高的精确度,但是one-stage的算法总是稍逊two-stage算法一筹,于是就有了Focal Loss来找场子。
在Focal Loss这篇论文中中,作者认为one-stage精确度不如two-stage是因为下面的原因:
① 正负样本比例极度不平衡。由于one-stage detector没有专门生成候选框的子网络,无法将候选框的数量减小到一个比较小的数量级(主流方法可以将候选框的数目减小到数千),导致了绝大多数候选框都是背景类,大大分散了放在非背景类上的精力;
② 梯度被简单负样本主导。我们将背景类称为负样本。尽管单个负样本造成的loss很小,但是由于它们的数量极其巨大,对loss的总体贡献还是占优的,而真正应该主导loss的正样本由于数量较少,无法真正发挥作用。这样就导致收敛不到一个好的结果。
既然负样本数量众多,one-stage detector又不能减小负样本的数量,那么很自然的,作者就想到减小负样本所占的权重,使正样本占据更多的权重,这样就会使训练集中在真正有意义的样本上去,这也就是Focal Loss这个题目的由来。
其实在Focal Loss之前,就有人提出了OHEM(online hard example mining)方法。OHEM的核心思想就是增加错分类样本的权重,但是OHEM却忽略了易分类样本,而我们知道这一部分是所有样本中的绝大部分。
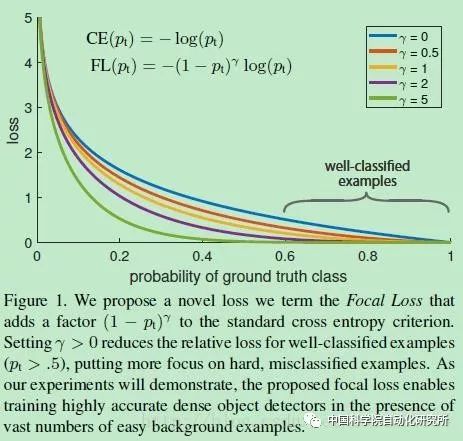
与OHEM不同,Focal Loss把注意力放在了易分类样本上,它的形式如图所示。Focal Loss是一种可变比例的交叉熵损失,当正确分类可能性提高时比例系数会趋近于0。这样一来,即使再多的易分类样本也不会主导梯度下降的过程,于是训练网络自然可以自动对易分类样本降权,从而快速地集中处理难分类样本。
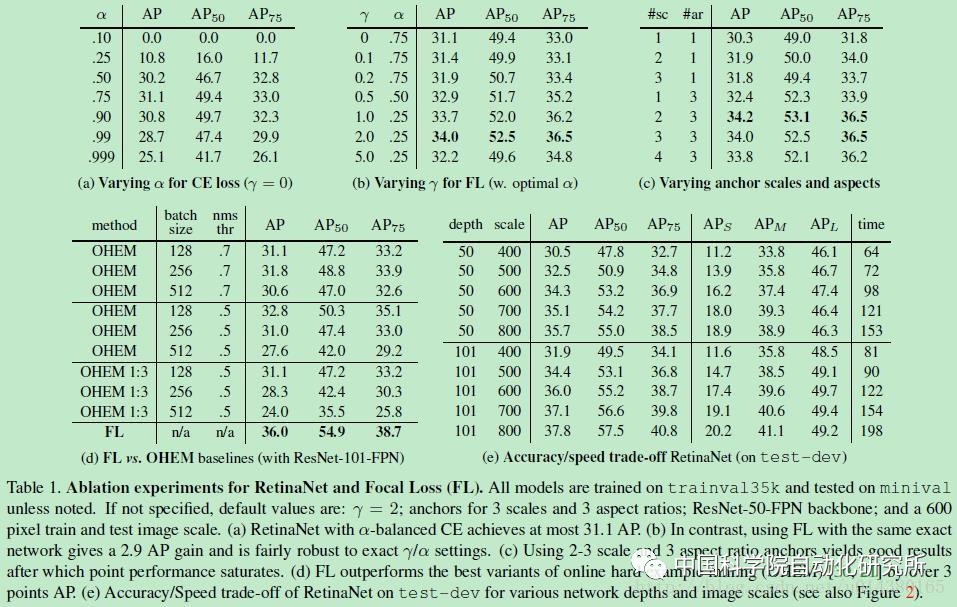
可以看出,Focal Loss打败了所有state-of-the-art的算法,而且竟然在速度上也是一马当先,可以说相当有说服力。但是作者为了证明Focal Loss的有效性,并没有设计更新颖的网络,这与其他算法提高精确度的做法是不一样的——他们要么改造原有算法的网络结构,要么另辟蹊径。另外,Focal Loss函数的形式并不是不可变的,只要可以达到对易分类样本降权的目的,可以在形式上有所变化。
总之,Class imbalance是阻碍one-stage方法提高准确率的主要障碍,过多的easy negative examples会在训练过程中占据主导地位,使训练结果恶化,所以要用Focal Loss对easy negative examples进行降权,而把更多的注意力集中在hard examples上。
四、总结
在深度学习被引入到目标检测领域之后,各种各样的网络框架层出不穷,各种比赛的精确度不断被刷新,我们的日常生活也日渐离不开人工智能的影响。



